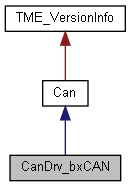
driver class to work with the STM32 bxCAN controller module More...
#include <CanDrv_bxCAN.h>
Public Member Functions | |
| CanDrv_bxCAN () | |
| standard constructor for a bxCAN controller object | |
| virtual | ~CanDrv_bxCAN () |
| standard destructor for a bxCAN controller object | |
| void | TxTask (void) |
| task function to push the tx message from software buffer to tx mailbox More... | |
| Std_ReturnType | Init (const CanConfigType *ptr2Config=NULL_PTR, const ComIf *ptr2ComIfObject=NULL_PTR) |
| Init function for the bxCAN. More... | |
| Std_ReturnType | SetControllerMode (ECU_CanController Controller, CanControllerStates Transition) |
| The API to set a controller mode. More... | |
| Std_ReturnType | Write (ECU_CanController Controller, const ComStack_CanMessageType *ptr2PduInfo) |
| The API to write a message to tx FIFO. More... | |
| Std_ReturnType | SetFilterByBitmask (ECU_CanController Controller, ComStack_CanIdType FilterId, ComStack_CanIdType FilterMask) |
| configure a free hardware filter using bit masking More... | |
| Std_ReturnType | SetFilterByCanId (ECU_CanController Controller, ComStack_CanIdType FilterId) |
| configure a free hardware filter using single CAN Id filtering More... | |
 Public Member Functions inherited from Can Public Member Functions inherited from Can | |
| Can () | |
| Standard Constructor. | |
| virtual | ~Can () |
| basic destructor | |
| CanDrvStates | GetDrvState (void) |
| To get the the software module state. | |
| void | SetDrvStateReady (void) |
| Switch driver state to ready. | |
| void | SetDrvStateUninit (void) |
| Switch driver state to uninit. | |
| virtual void | Deinit (void) |
| The API function for Deinit. More... | |
| virtual Std_ReturnType | SetBaudrate (ECU_CanController Controller, CanControllerBaudRateConfigID BaudrateId) |
| The API to set baudrate on a controller. More... | |
| virtual void | DisableControllerInterrupts (ECU_CanController Controller) |
| The API to disable all interrupts of a controller. More... | |
| virtual void | EnableControllerInterrupts (ECU_CanController Controller) |
| The API to enable all interrupts of a controller. More... | |
| virtual Std_ReturnType | CheckWakeup (ECU_CanController Controller) |
| The API checks the controller for wakeup events. More... | |
| virtual Std_ReturnType | GetControllerErrorState (ECU_CanController Controller, uint8_t *ErrorStatePtr) |
| The API returns the error state of the CAN controller. More... | |
| virtual Std_ReturnType | GetControllerMode (ECU_CanController Controller, CanControllerStates *ControllerModePtr) |
| The API returns the error state of the CAN controller. More... | |
Private Member Functions | |
| Std_ReturnType | FindFreeFilter (const uint8_t *ptr2FilterBankNumber, const uint8_t *ptr2FilterNumber, const uint8_t *ptr2FilterMode) |
| to find a free CAN hardware filter More... | |
| uint32_t | CanIdToStmRegisterFormat (ComStack_CanIdType CanId) |
| change the 32bit format to use with STM Registers More... | |
Private Attributes | |
| CAN_HandleTypeDef | bxCanHdl [2] |
| we need a handle to hold the information for the bxCAN controller | |
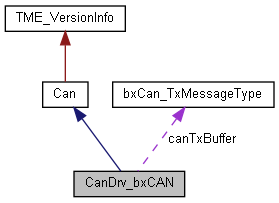
| bxCan_TxMessageType | canTxBuffer [CAN_TX_SW_BUFFER_SIZE] |
| we want a Tx software buffer More... | |
Detailed Description
driver class to work with the STM32 bxCAN controller module
Definition at line 183 of file CanDrv_bxCAN.h.
Member Function Documentation
◆ CanIdToStmRegisterFormat()
|
private |
change the 32bit format to use with STM Registers
- Parameters
-
[in] CanId should be a CanIf formated CanId
- Returns
- CanId in STM bxCAN Register format
Definition at line 432 of file CanDrv_bxCAN.cpp.
References bxCan_IdSelectType::common, bxCan_StdCanIdType::Id11bit, bxCan_ExtCanIdType::Id29bit, bxCan_ExtCanIdType::IDE, bxCan_StdCanIdType::RTR, bxCan_ExtCanIdType::RTR, bxCan_IdSelectType::stm_ExtId, bxCan_IdSelectType::stm_StdId, and TRUE.
Referenced by SetFilterByBitmask(), and SetFilterByCanId().
◆ FindFreeFilter()
|
private |
to find a free CAN hardware filter
STM hasn't a function like this in the HAL.
We find a free hardware filter and returns the filter bank to use the filter.
We returns the filter number to use it on fast selection in IRQ routine.
The filter mode is used to search for mask or identifier filter. If searching for identifier filter we returns also if there is a FR2 is empty
- Parameters
-
[out] ptr2FilterBankNumber returns the number of the first free filter bank [out] ptr2FilterNumber returns the filter number according to the previous filter configuration [in,out] ptr2FilterMode selects the search for Mask filter (aka deactivated filter) or Identifier Filter. on Identifier Filter search it returns if the FR1 register is already in use
- Returns
- E_OK ........... we found an unused filter
- E_NOT_OK ........... we can't find an unused filter
- Todo:
- we need to clean up the filter number CAN1_USED_RX_HW_FILTER
- Todo:
- we need a readable implementation for the "second identifier filter bit" inside ptr2FilterMode
Definition at line 281 of file CanDrv_bxCAN.cpp.
References AUTOMATIC, bxCanHdl, E_NOT_OK, E_OK, FALSE, P2VAR, and TRUE.
Referenced by SetFilterByBitmask(), and SetFilterByCanId().
◆ Init()
|
virtual |
Init function for the bxCAN.
- Todo:
- we need a generic mode for IRQ activation
- Warning
- here will be done the unique connection to the interrupt handles we need a good C++ way for this we will switch to function pointer inside the Init-structure later
Implements Can.
Definition at line 65 of file CanDrv_bxCAN.cpp.
References AUTOMATIC, bxCanHdl, CAN_DET_REPORTERROR, CAN_INIT_ID, E_INIT_FAILED, E_NOT_OK, E_TRANSITION, Can::GetDrvState(), NULL_PTR, P2CONST, ptr2ComIf, and Uninit.

◆ SetControllerMode()
|
virtual |
The API to set a controller mode.
- Parameters
-
[in] Controller selects the controller [in] Transition selects the transition per name/id
- See also
- CAN_SET_CONTROLLER_MODE_ID
- Todo:
- maybe we add the possibility to call the function with Controller == ECU_CanController::NBROF_CanController
Implements Can.
Definition at line 145 of file CanDrv_bxCAN.cpp.
References bxCanHdl, CAN_DET_REPORTERROR, CAN_SET_CONTROLLER_MODE_ID, CS_Started, E_NOT_OK, E_OK, and E_TRANSITION.
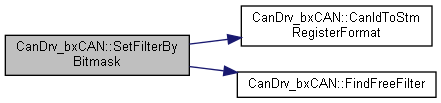
◆ SetFilterByBitmask()
|
virtual |
configure a free hardware filter using bit masking
set hardware filter
- Attention
- This isn't the same like inside STM register access. But the function manages the correct use for STM HAL
- bit 31 is IDE
- bit 30 is RTR
- Parameters
-
[in] Controller select the controller where the filter should be applied [in] FilterId the selected filter bits [in] FilterMask the filter mask to select valid filter bits
- Returns
- E_OK if the filter is applied, E_NOT_OK no hardware filter free
- Todo:
- we need a handling to select different Rx Fifo
Reimplemented from Can.
Definition at line 339 of file CanDrv_bxCAN.cpp.
References bxCanHdl, CanIdToStmRegisterFormat(), E_NOT_OK, E_OK, and FindFreeFilter().
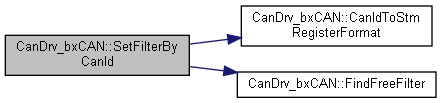
◆ SetFilterByCanId()
|
virtual |
configure a free hardware filter using single CAN Id filtering
set hardware filter
- Parameters
-
[in] Controller select the controller where the filter should be applied [in] FilterId the selected filter bits
- Returns
- E_OK if the filter is applied, E_NOT_OK no hardware filter free
- Todo:
- we need a handling to select different Rx Fifo
Reimplemented from Can.
Definition at line 383 of file CanDrv_bxCAN.cpp.
References bxCanHdl, CanIdToStmRegisterFormat(), E_NOT_OK, E_OK, and FindFreeFilter().
◆ TxTask()
|
virtual |
task function to push the tx message from software buffer to tx mailbox
- Todo:
- the Tx Task need handling to transmit to other CAN controller then the bxCanMaster
Reimplemented from Can.
Definition at line 233 of file CanDrv_bxCAN.cpp.
References bxCanHdl, canTxBuffer, Can::GetDrvState(), bxCan_TxMessageType::Header, bxCan_TxMessageType::Mailbox, Ready, bxCan_TxMessageType::State, TxMessage_free, TxMessage_rdy2tx, TxMessage_transmit, TxMessage_txerr, and TxMessage_txok.

◆ Write()
|
virtual |
The API to write a message to tx FIFO.
- Parameters
-
[in] Controller select the controller for tx [in] PduInfo the CAN message to send
Reimplemented from Can.
Definition at line 186 of file CanDrv_bxCAN.cpp.
References CAN_DET_REPORTERROR, CAN_WRITE_ID, canTxBuffer, bxCan_TxMessageType::Controller, bxCan_TxMessageType::Data, E_NOT_OK, E_OK, E_UNINIT, Can::GetDrvState(), bxCan_TxMessageType::Header, Ready, bxCan_TxMessageType::State, TRUE, TxMessage_free, TxMessage_rdy2tx, and TxMessage_write.

Member Data Documentation
◆ canTxBuffer
|
private |
we want a Tx software buffer
we start with a fix size. Later it would be go to the IDE
- Todo:
- bring the buffers to save class
Definition at line 276 of file CanDrv_bxCAN.h.
The documentation for this class was generated from the following files:
- E:/Embedded_SourceCode/STM32IDE_ws/NucleoCanDev/Drivers/BSP/TM_Engineering_board/Can/CanDrv_bxCAN.h
- E:/Embedded_SourceCode/STM32IDE_ws/NucleoCanDev/Drivers/BSP/TM_Engineering_board/Can/CanDrv_bxCAN.cpp
