Table of Contents
- Einleitung
- Das STM32CubeIDE Expansion Package herunter laden
- Starten eines neuen Projektes
- Wie kommt das Expansion Package in die STM32CubeIDE
- Konfiguration der Module
- Den Code für das CanIf Modul generieren
- Das ExpansionPack übernimmt Aufgaben aus der HAL
- Es wird Zeit für die Hardware
- Was ist bei einem "normalen" Öffnen der IDE anders als beim ersten Start
The English version is here.
Einleitung
Dieses Tutorial beschreibt den grundsätzlichen Umgang mit dem ExpansionPack. Beginnend mit dem Aufsetzen eines neuen Projektes in der STM32CubeIDE über das Laden des Packs und dessen Konfiguration, sowie dem Senden (und später auch dem Empfangen) von einfachen CAN Messages. Die Tutorialbeschreibung ist als Einstieg für jeden gedacht und zur besser Verständlichkeit sehr Bilder lastig, man muss also relativ viel scrollen. Für jemanden der sich in der STM32CubeIDE oder auch in Eclipse schon zurecht findet, wird vieles obligatorisch sein.
Das STM32CubeIDE Expansion Package herunter laden
Es macht Sinn das ExpansionPack vor Beginn zu downloaden. Wenn man sich im Repository bewegt, hat man das ExpansionPack schon vorliegen. Nun auch auf github
Starten eines neuen Projektes
Nach dem Start der STM32CubeIDE wird man nach dem Workspace gefragt in welchem man arbeiten möchte. Ich nutze für das gesamte Projekt um den CAN Stack durchgängig den Workspace wie im folgenden Bild.
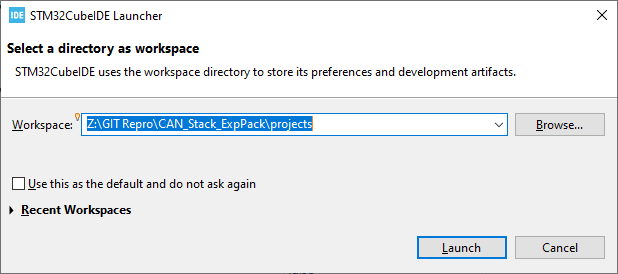
Hierbei sei erwähnt, dass das "projects"-Verzeichnis eben auch jenem entspricht, welches als Spiegel zum Repository gepflegt wird. Möchte man das Tutorial unabhängig durch spielen, so macht es Sinn ein abweichendes Verzeichnis anzugeben.
Beim ersten Start der STM32CubeIDE wird man von dem "Information Center" begrüßt. Hier wählen wir natürlich für's Erste aus, dass wir ein neues Projekt starten möchten.
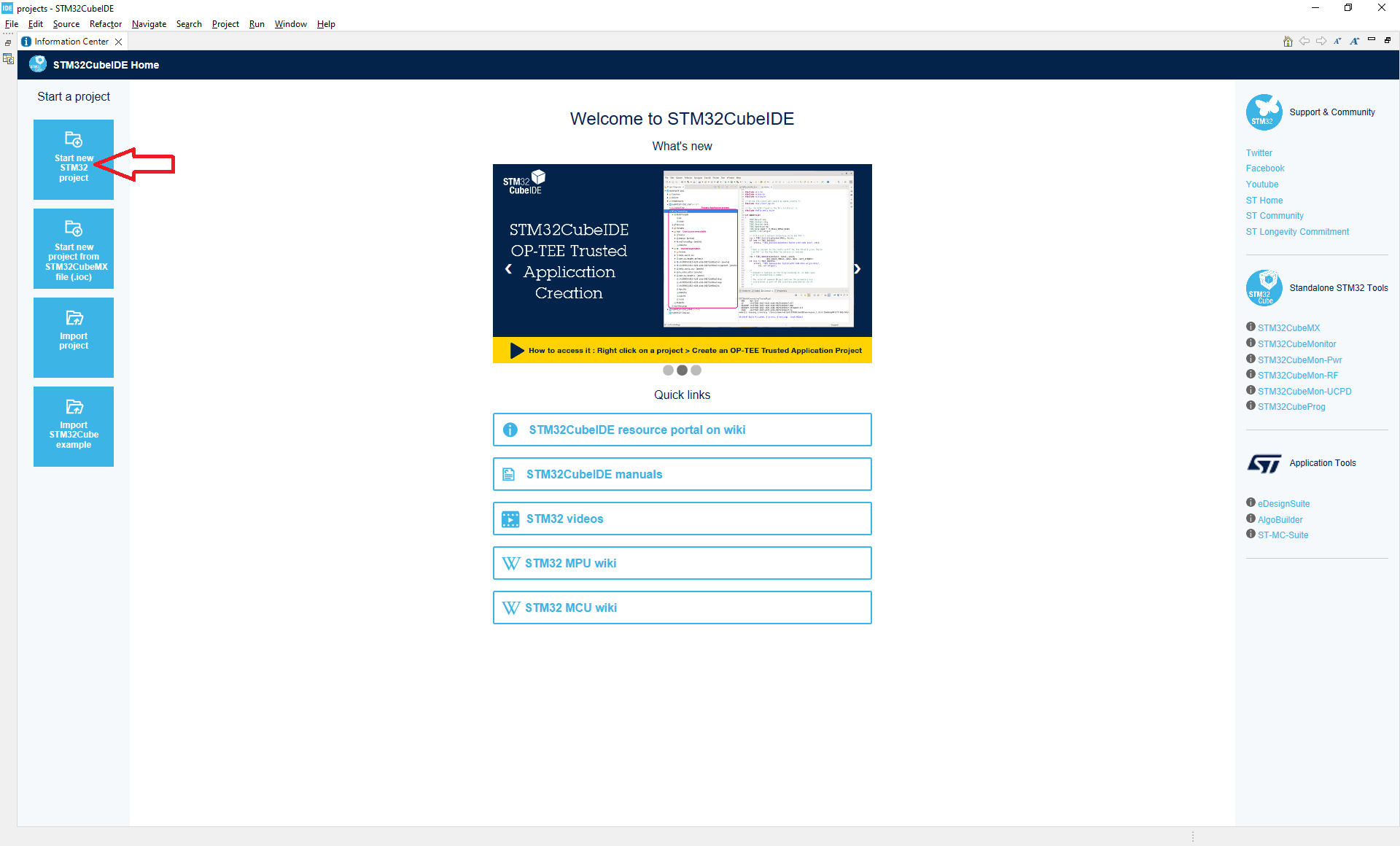
Später wird dieses "Information Center"-Fenster nicht unmittelbar beim Start angezeigt. Ich werde am Ende des Tutorials kurz auf den Neustart der STM32CubeIDE eingehen.
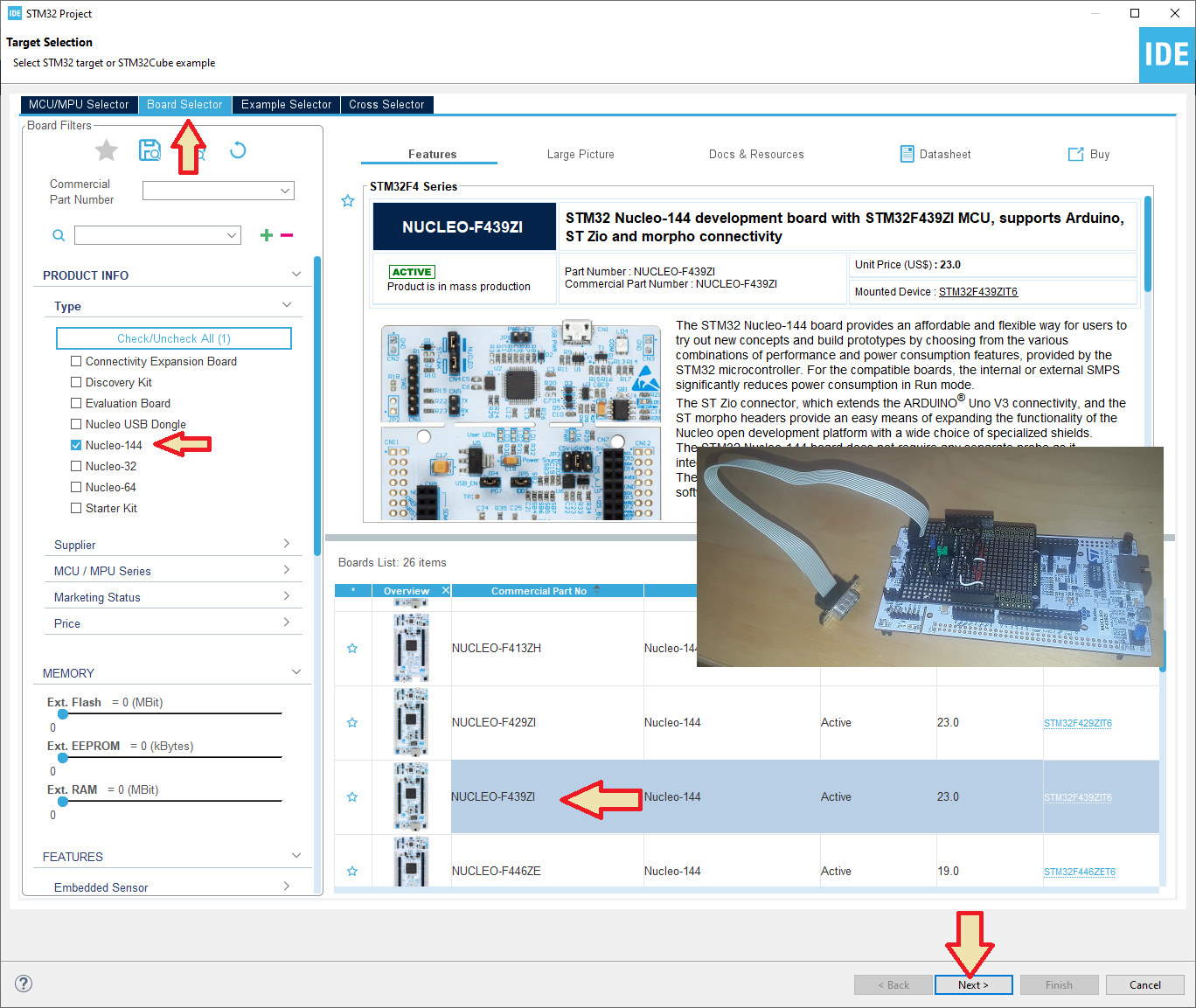
Ein STM32CubeIDE-Projekt (und auch ein STM32CubeMX-Projekt) baut natürlich auf einen bekannten STM32-Mikrocontroller auf. Ich habe ein Nucleo-F439ZI Board, auf welchen ich arbeite. Das NUCLEO-F439ZI hat, wie fast alle anderen NUCLEO-Boards auch, standardmäßig kein CAN. Man kommt aber über die "ARDUINO(R) UnoV3" Verbinder an die notwendigen Pins heran. So habe ich mir ein "Extension Board" mit zwei CAN Transceiver gebastelt. Wir werden später die verwendeten Port-Pins auswählen.
Die folgenden Dialoge sollten selbst erklärend sein. Wichtig ist, dass das ExpansionPack in C++ geschrieben ist. Die Voreinstellung ist hier leider immer C. Die Auswahl des verwendeten STM32Cube Firmware Package spielt aktuell noch keine Rolle, also sollte das aktuellste verwendet werden.
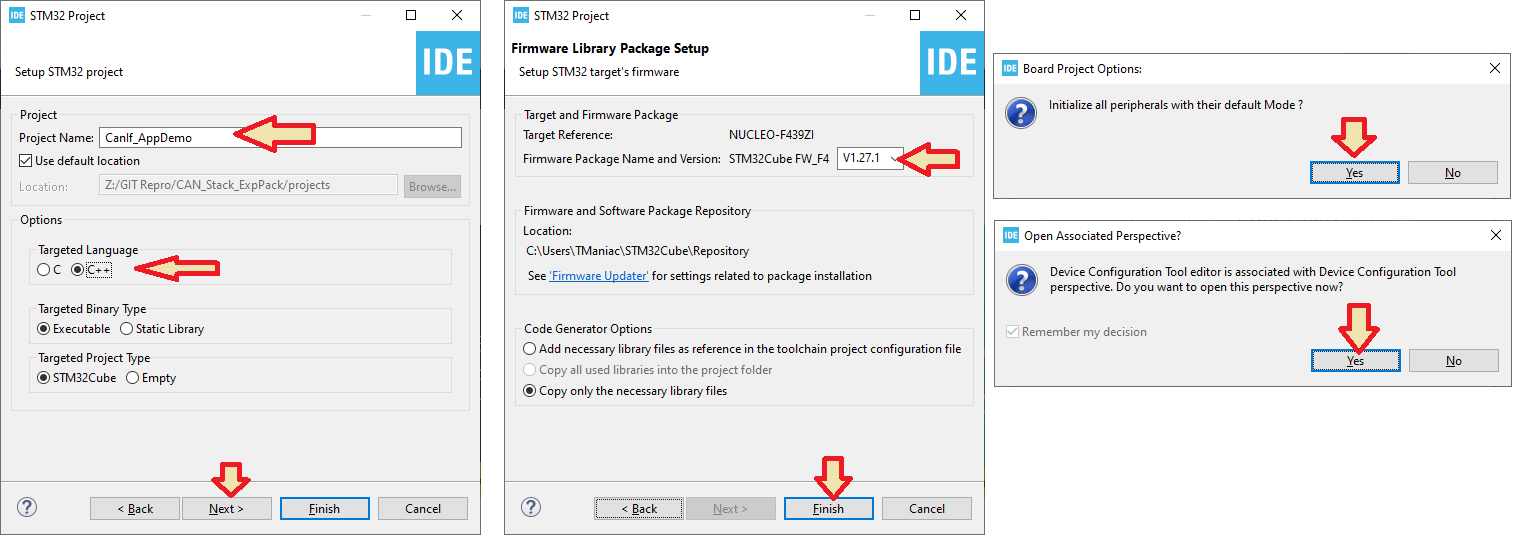
Das Initialisieren der gesamten MCU-Peripherie ist nicht unbedingt erforderlich. Da es aber auch die Takterzeugung beinhaltet, ist es in den meißten Fällen sinnvoll.
Mit "Open Associated Perspective" wird in der STM32CubeIDE (entsprechend der Eclipse Umgebung) immer die Ansicht geöffnet, welche eben für den Arbeitsschritt am besten geeignet oder evtl sogar erforderlich ist. Hier wird im folgenden die Perspective geöffnet, welche die Konfiguration mit grafischer Unterstützung ermöglicht. Die Perspective sieht wie folgt aus:
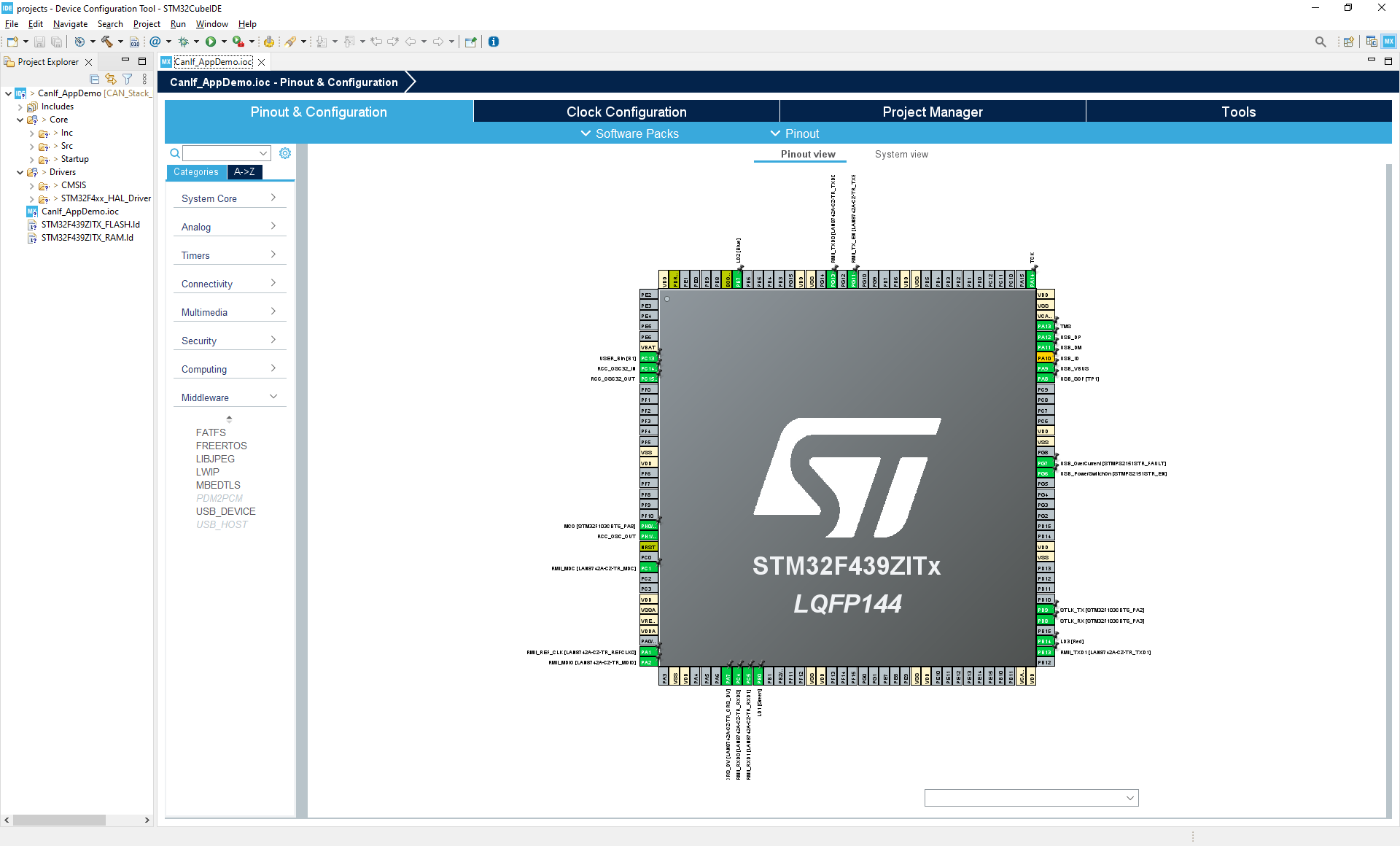
Ich möchte hier nicht explizit auf den Aufbau der STM32CubeIDE eingehen. Wichtig an dieser Stelle ist, das wir auf der linken Seite den "normalen" Eclipse Project Browser haben. Der Großteil der Arbeitsfläche wird von der Darstellung der "*.ioc"-Datei verwendet. Die Ansicht des Controllers ist auf den jeweilgen Footprint angepasst. Wie man auf dem Bild erkennen kann, hat der STM32F439ZIT auf meinem NUCLEO-F439ZI Board einen LQFP144 Footprint.
Die STM32CubeIDE benennt die neu erzeugte "*.ioc"-Datei genauso wie das Projekt. Demnach haben wir jetzt eine "CanIf_AppDemo.ioc".
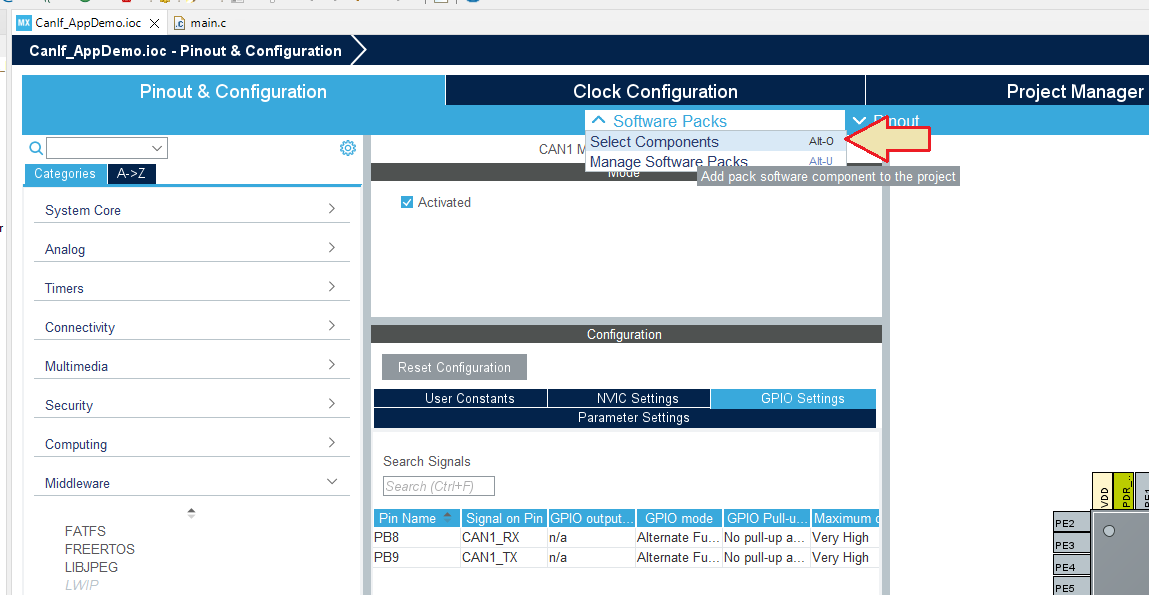
Da wir den CAN-Controller verwenden wollen, müssen wir diesen auch konfigurieren. CAN stellt eine "Connectivity" Peripherie dar. Also finden wir unter diesem Punkt auch die Module "CAN1" und "CAN2". Bei meinem NUCLEO-F439ZI gibt es standardmäßig keine Vorbereitung für CAN, also sind diese Module deaktiviert. Wählt man "CAN1" (oder auch "CAN2") aus, so erscheint eine zusätzliche Spalte mit der Bezeichnung "CAN1 Mode and Configuration". Die Darstellung mit diesen drei Spalten ist jener Aufbau welcher für die Konfiguration der STM32Cube-Elemente (welche intern immer als Pack gehandhabt werden) verwendet wird.
Im Bereich "Mode" aktiviert man die jeweiligen Module. Wir aktivieren nun das CAN1 Module durch setzen des Hakens "Activated".
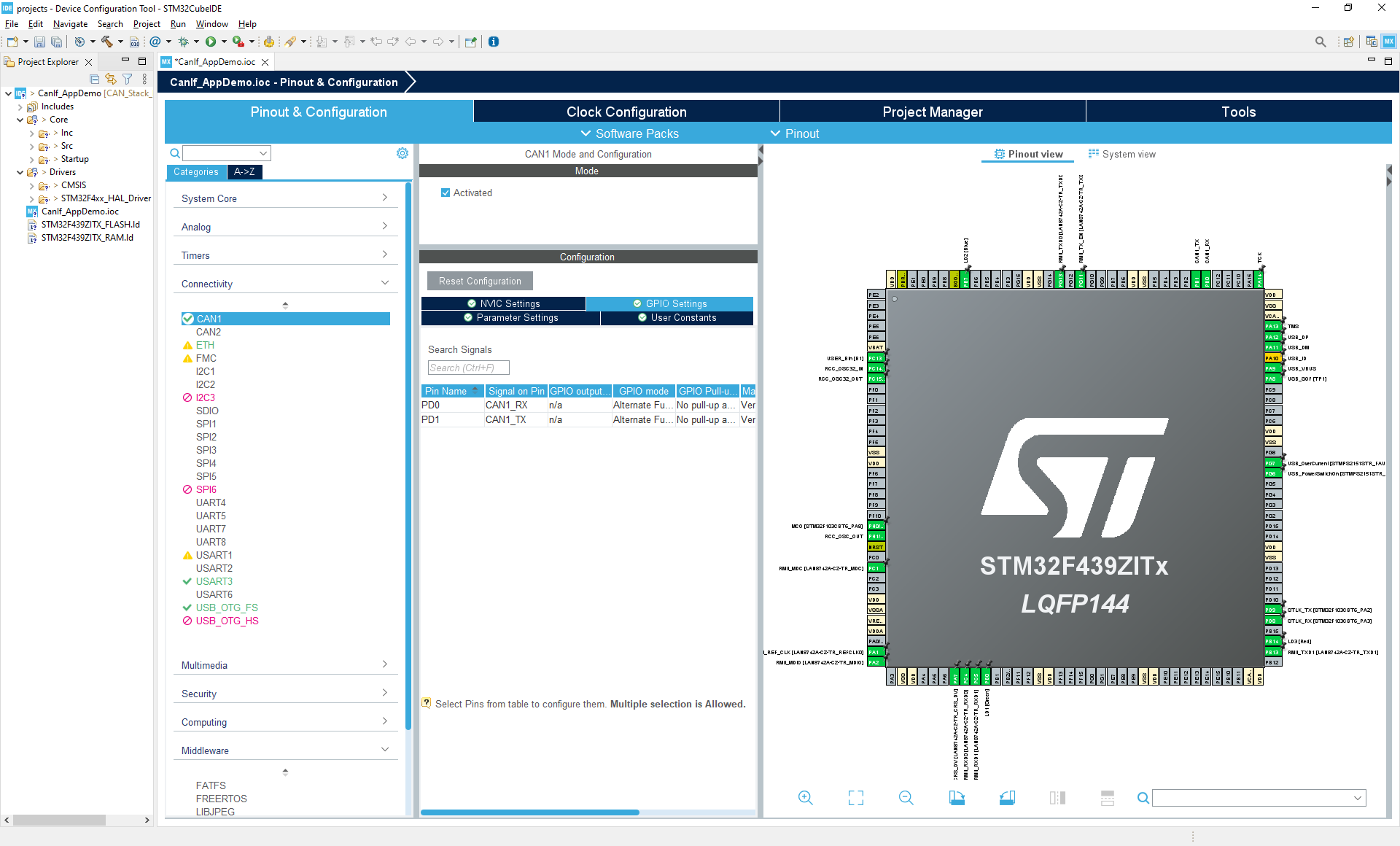
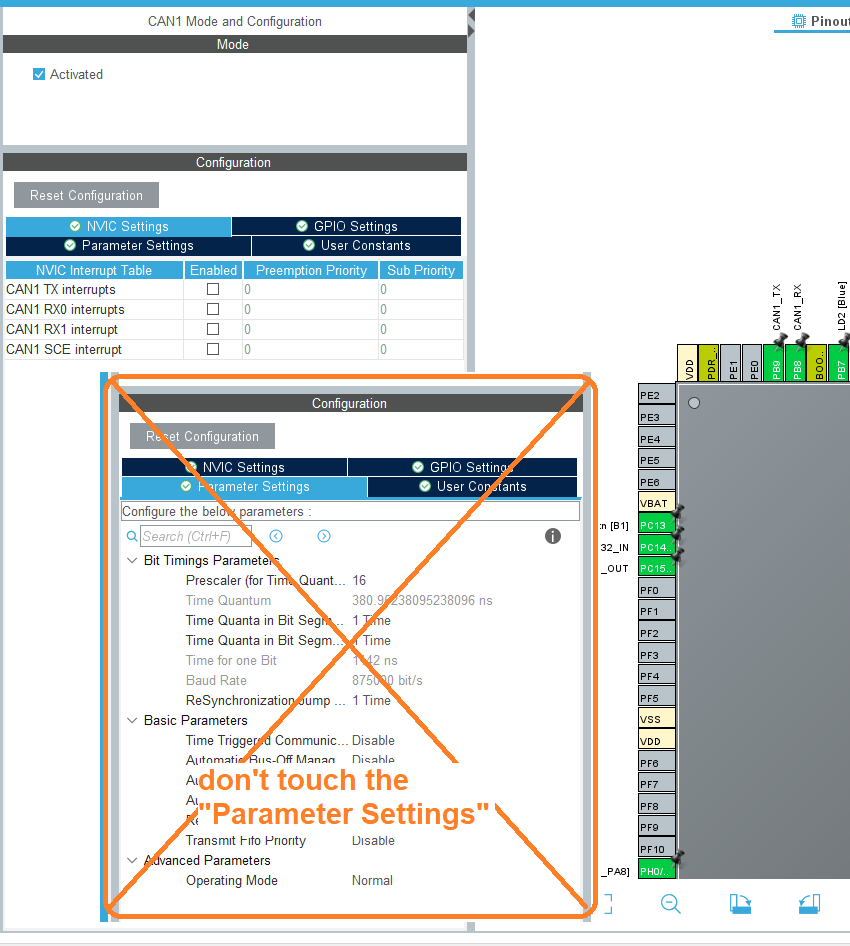
Jetzt werden im Bereich "Configuration" vier Tabs angezeigt. Der Tab "User Constants" spielt für uns keine Rolle. Dieser Tab wird in jeden Modul angezeigt. "Parameter Settings" beinhaltet die Startup Parameter des CAN-Controllers und NVIC Settings die Einstellung der verwendeten Interrupt-Callbacks. Das ExpansionPack CAN Stack übernimmt auch die Konfiguration der Startup Parameter, also lassen wir die "Parameter Settings" hier wie sie sind. Die Konfiguration der Interrupt-Callbacks werden wir später aufgreifen.
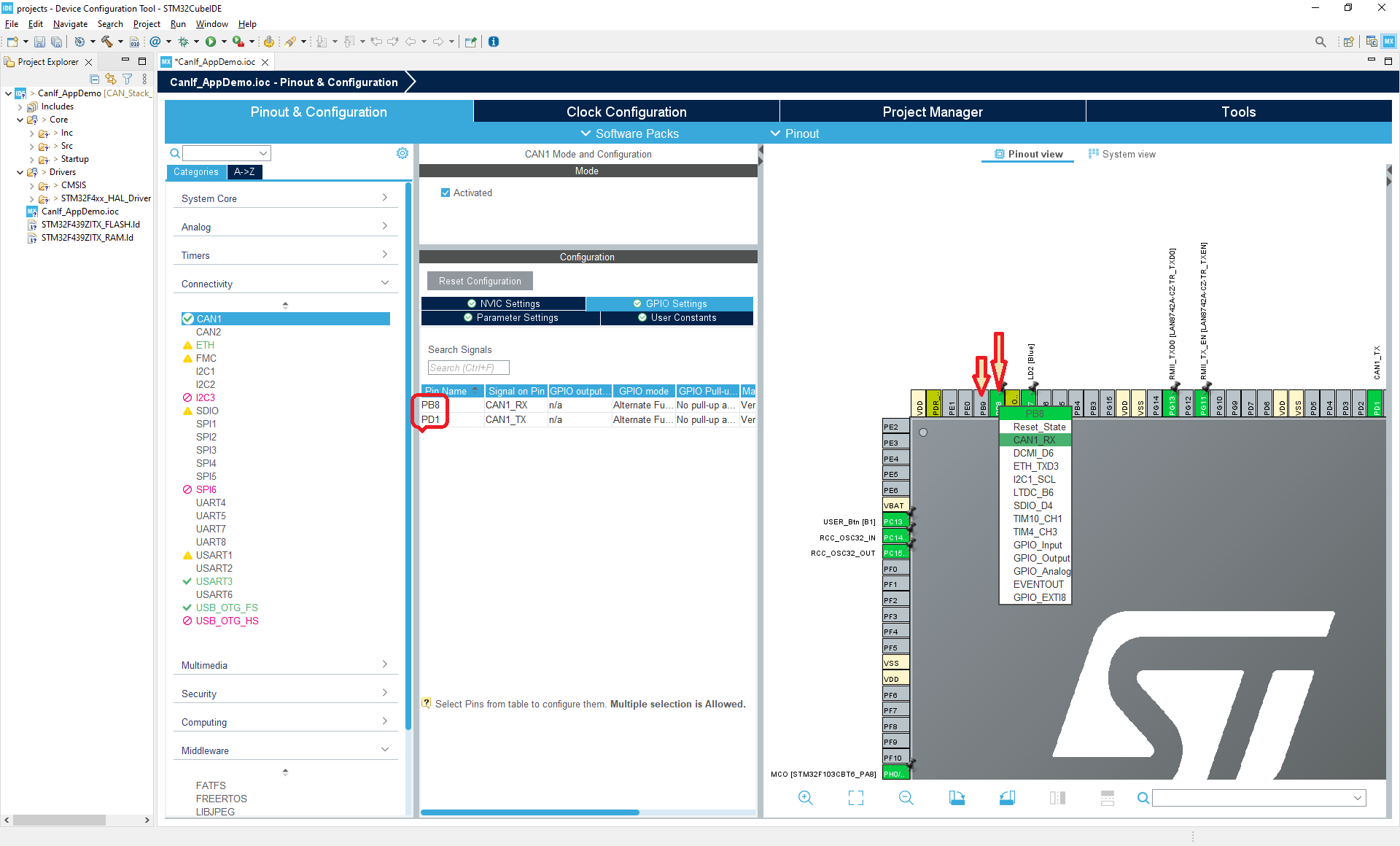
Im Tab "GPIO Settings" werden die Port-Pins eingestellt, bzw angezeigt. Die Funktion der Pins lassen sich durch anklicken des Pins in der µC-Darstellung direkt auswählen. Bei meinem CAN-Transceiver-Board sind CAN1_RX an PB8 und CAN1_TX an PB9 angebunden. So nehme ich diese Einstellung hier auch vor.
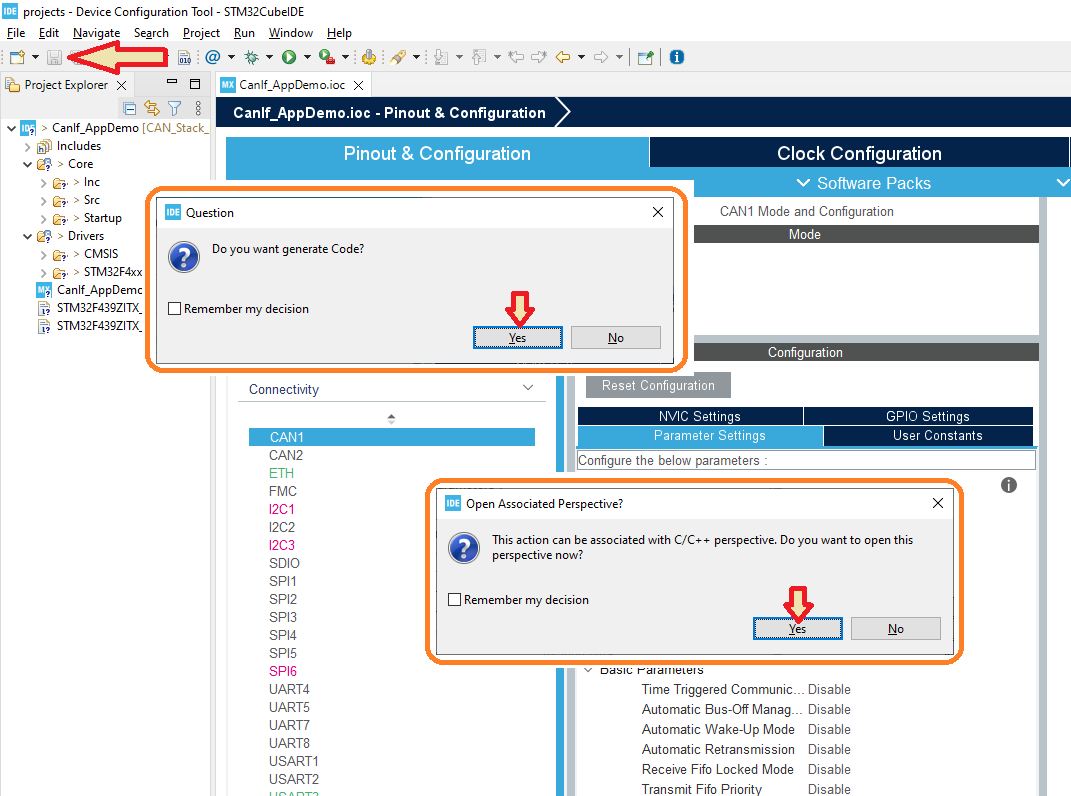
Nun wird es Zeit die Konfiguration das erste Mal zu speichern. Beim Klick auf die "Diskette" speichert STM32CubeIDE (entsprechend der Eclipse-Umgebung) die jeweils aktive Datei. Da wir gerade die "CanIf_AppDemo.ioc" bearbeitet haben, wird diese gespeichert. Beim speichern einer "*.ioc-Datei" fragt die STM32CubeIDE standardmäßig ob der Source Code generiert werden soll. (Das sollte man später im Hinterkopf behalten, wenn man testweise Code ändert.) Danach wird man gefragt ob man zur C/C++ Perspective wechseln möchte.
Der erzeugte Code sollte build-fähig sein. Das können wir durch den Klick auf den "Hammer" probieren
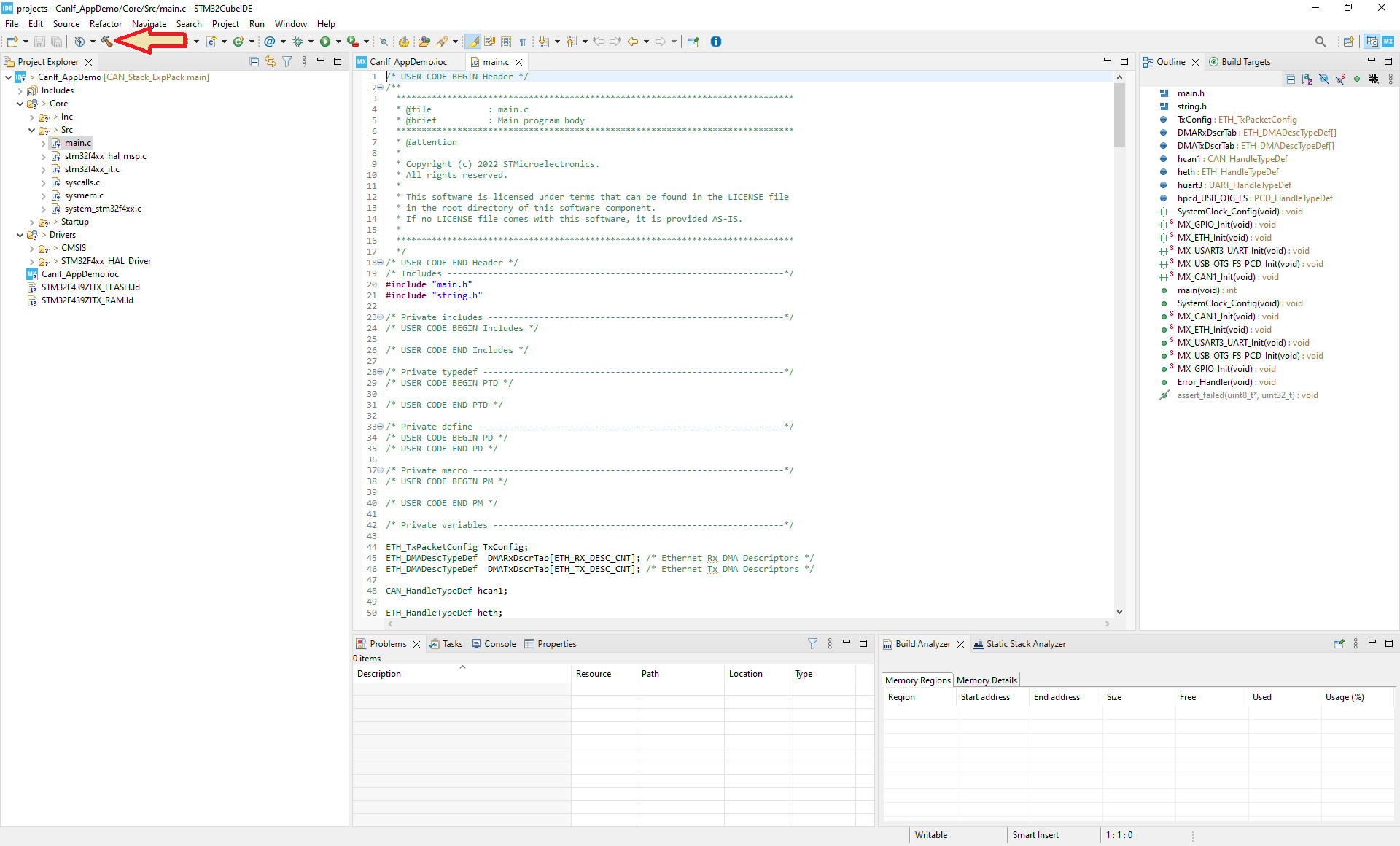
Im Project Browser sind nun auch die neuen Dateien sichtbar. Die C/C++ Perspective bietet uns eine "Outline"-Übersicht über die aktive Datei. Im unteren Bereich der IDE findet man weitere hilfreiche Fenster. Details sollte man sich selber in diversen Eclipse Tutorials erarbeiten.
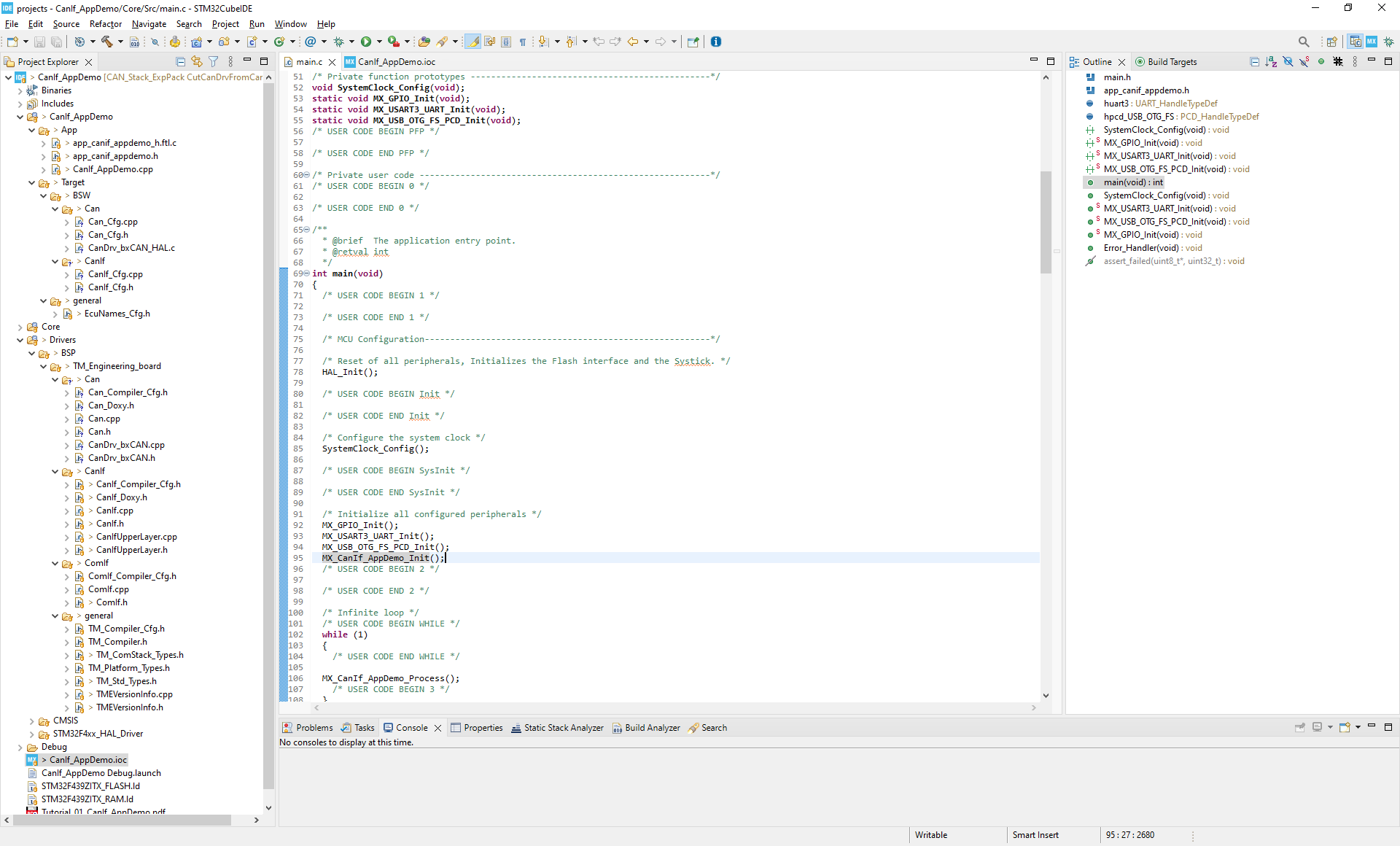
Kurzer Überblick über den Aufbau der main.c Datei
Ich möchte hier an Hand der main.c Datei ganz kurz auf ein paar Besonderheiten im Umgang mit der Code Generierung in der STM32CubeIDE eingehen. Vielleicht verschiebe ich das Kapitel mal und mache es etwas ausführlicher. Dann kann man auch Besonderheiten bei der Bearbeitung der *.ftl Templates eingehen.
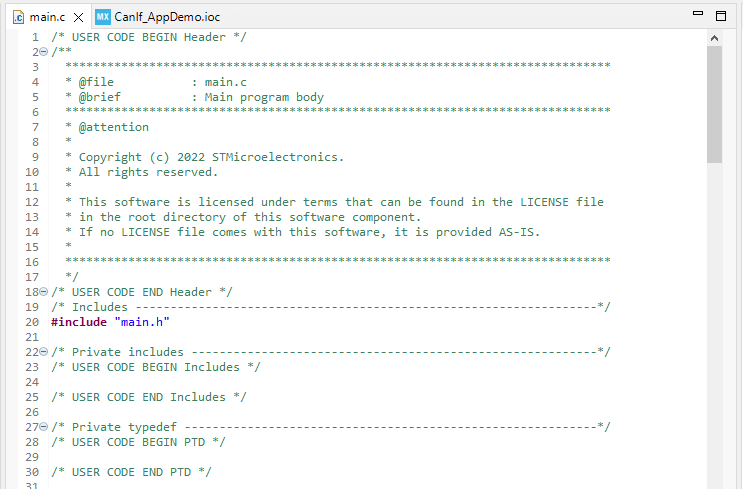
STM nutzt eine Doxygen taugliche Formatierung, so dass man auch die Lizenzinformationen in der Source Code Doku einbinden kann. Der Dateikopf ist in einem
USER CODE BEGIN Header [...] USER CODE END Header
Block eingeordnet. Alles was in solch einem Block steht, wird bei einer erneuten Generierung nicht geändert. Diese Blöcke werden aber durch den Generator vorgegeben. Es macht also keinen Sinn selber solche Blöcke zu ergänzen. Man sieht hier zum Beispiel die "User Code" Blöcke für Includes und typedefs.
Es sei aber erwähnt, das der Code "verschwindet" wenn die Datei bei der Code Generation entfernt wird, zum Beispiel dann wenn man ein Modul deaktiviert.
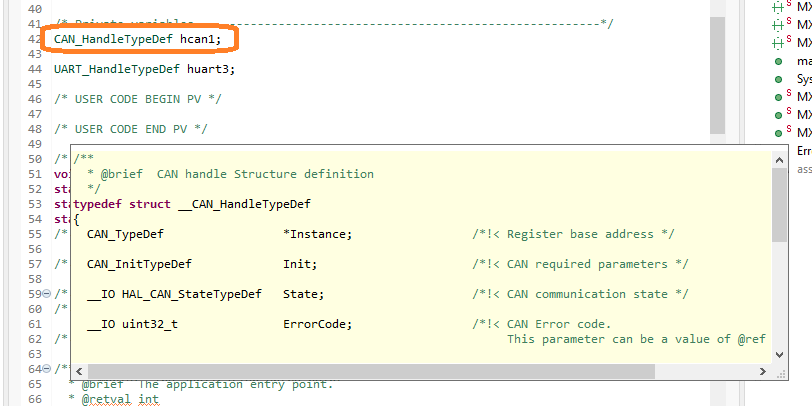
STM nutzt "Handle"-Strukturen um mit der jeweiligen Peripherie (bis auf GPIO) zu arbeiten. Standardmäßig wird das Handle-Objekt im Kontext der main.c erzeugt. Dieses endhält neben dem Pointer zu den Registern auch eine Struktur zur Initialisierung.
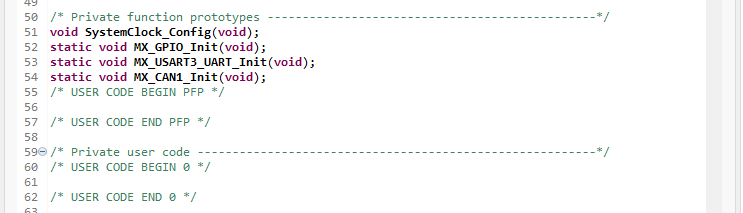
Diese MX_(HW-Module)_Init() Funktionen werden für jedes Modul generiert. Logisch werden diese Funktionen weiter unten dann mit den Parametern aus dem *.ioc File gefüttert.
Darüber hinaus haben wir hier auch Platz um eigene (einfache) Funktionen zu deklarieren ("User Code * PFP") und auch zu definieren ("User Code * 0"). Wie gesagt, was man in solch einen Block hinein schreibt, bleibt auch bei einer Re-Generation erhalten.
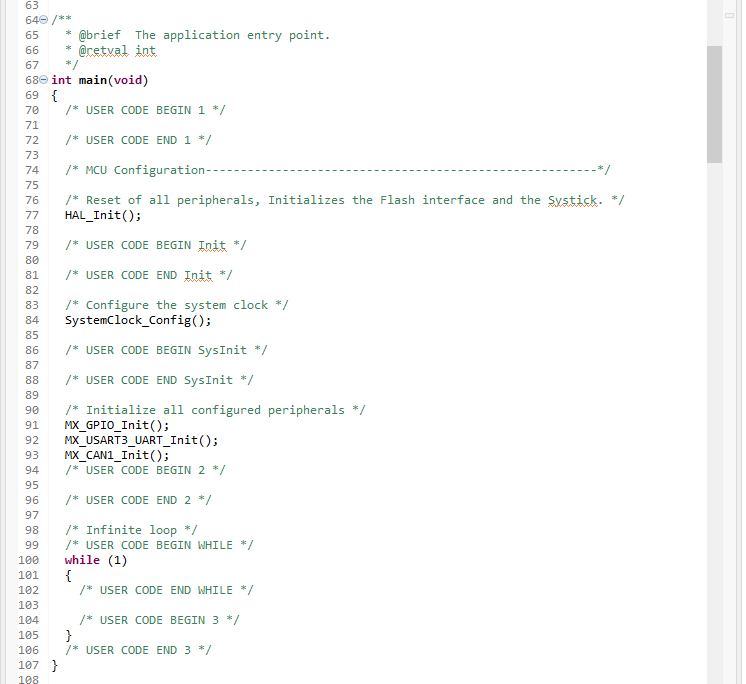
Die eigentliche main() Funktion ruft der Reihe nach die Init() -Funktionen auf und geht anschließend in die für Mikrocontroller typische while(1) Schleife.
Die Reihenfolge der MX_(HW-Module)_Init() Funktionen wird leider vom Code Generator vorgegeben. So lange man ausschließlich die HAL nutzt, spielt das keine Rolle. Da wir in unserem Expansion Pack aber HAL-Aufgaben übernehmen wollen, braucht es da einen gezielten Ansatz.
Nach der main() kommen dann die einzelnen MX_(HW-Module)_Init() Funktionen. Als Beispiel hier nur kurz MX_CAN1_Init() Funktionen
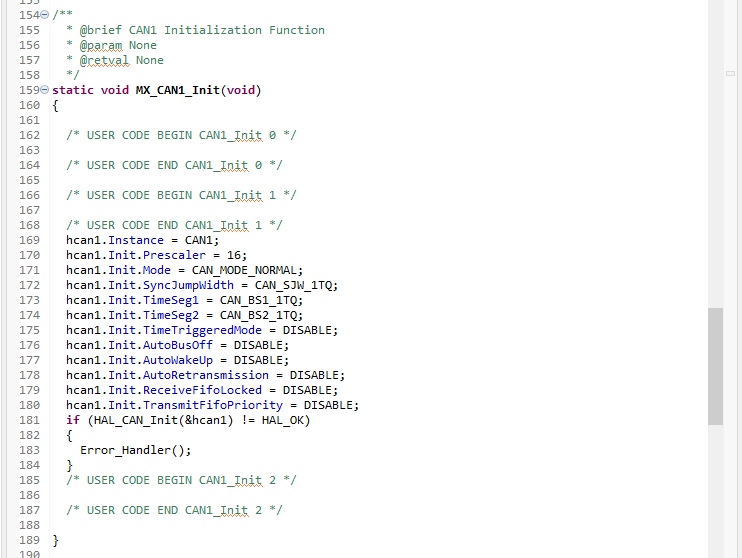
Grundsätzlich wird nur die Init-Struktur gefüllt und dann die eigentliche HAL_CAN_Init() aufgerufen. Nur wo werden die Pins zu geordnet. Dazu komme ich dann wenn es so weit ist.
Wie kommt das Expansion Package in die STM32CubeIDE
Manage Software Packs
Nun wollen wir aber endlich das STM32Cube ExpansionPack zu unserem Projekt hinzufügen. Als erstes müssen wir der IDE sagen wo sie das ExpansionPack findet.
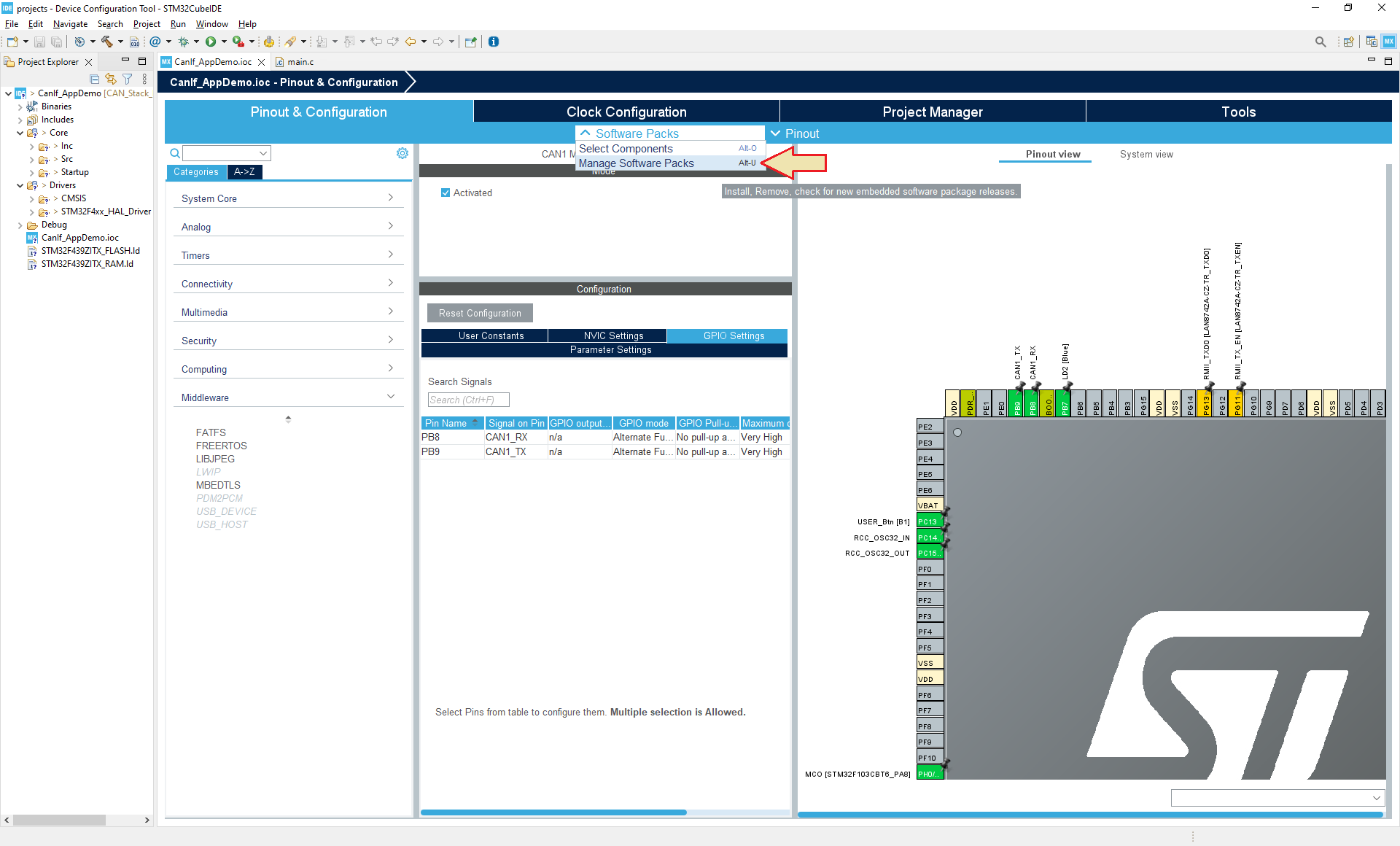
Wir gehen also wieder in die Ansicht der CanIf_AppDemo.ioc Datei und wählen "Manage Software Packs".
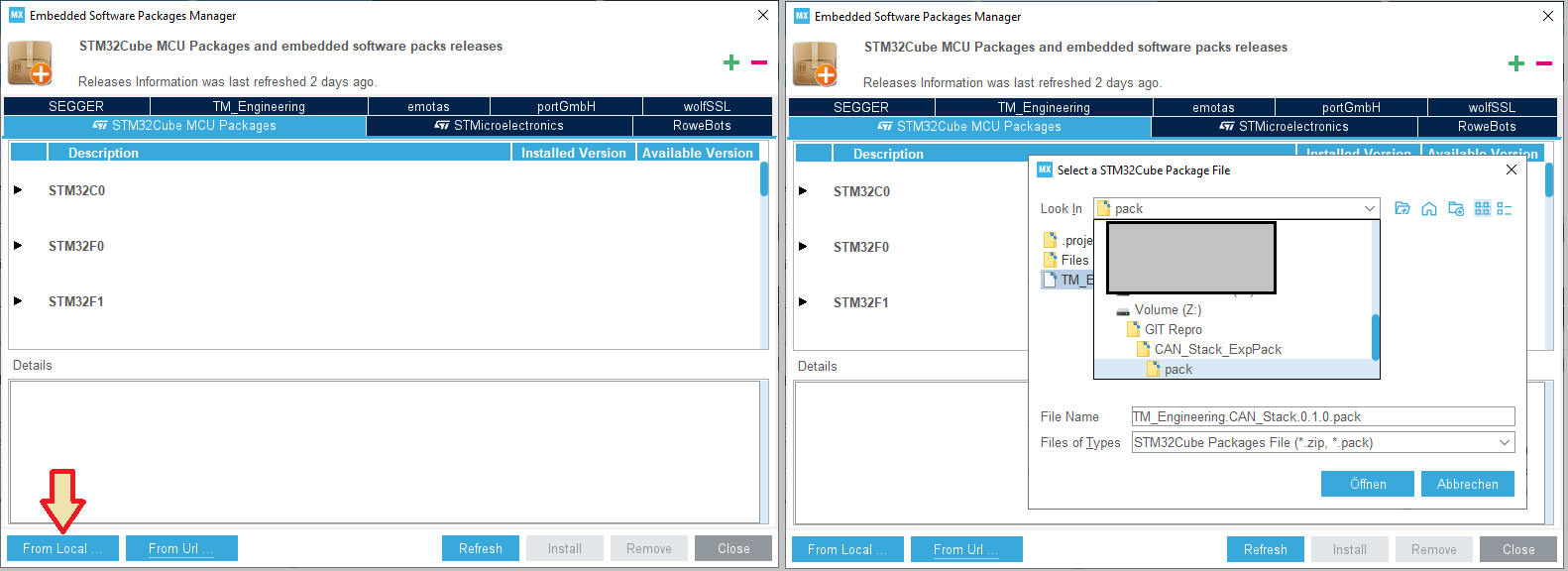
Man kann das ExpansionPack entweder lokal von der Festplatte oder per URL aus der Ferne integrieren. Wir hatten am Anfang das ExpansionPack herunter geladen (oder wir haben es parallel in einem Development-Verzeichnis). Dieses ExpansionPack suchen wir hier und wählen es aus.
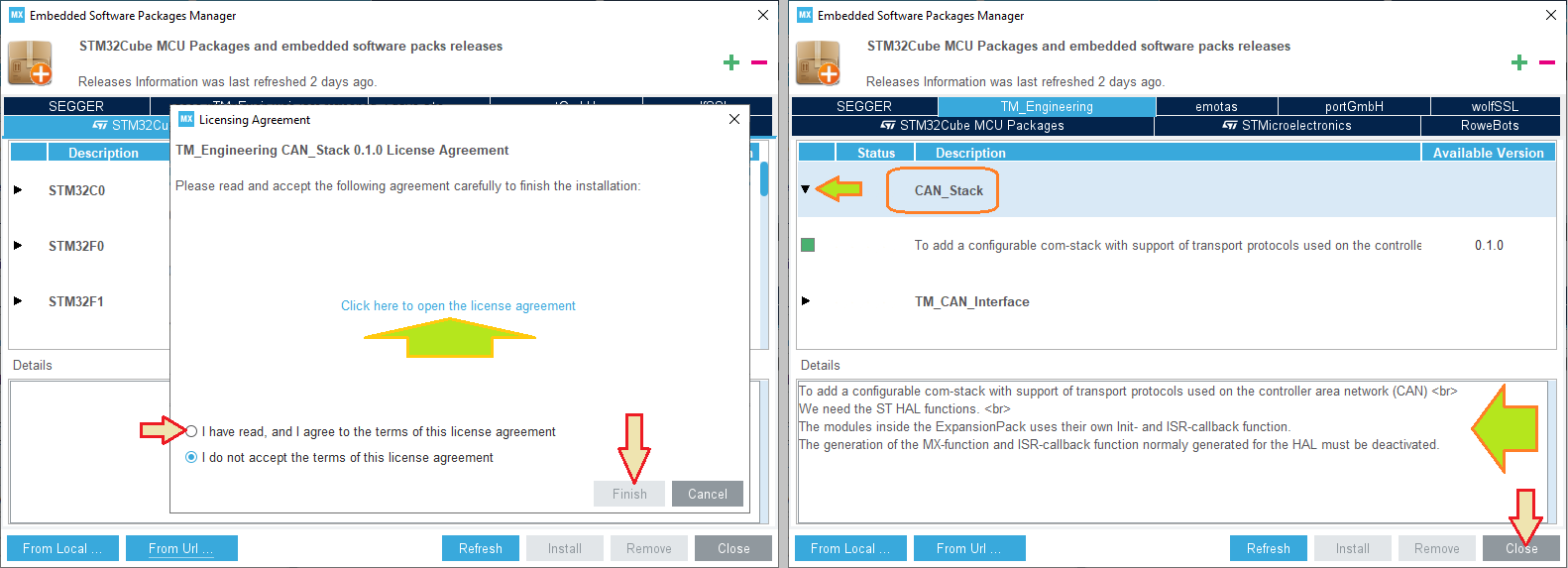
Wenn wir dann die Lizenzbedingungen gelesen und akzeptiert haben, ist das ExpansionPack integriert.
Man findet hier in dem Fenster auch ein paar nützliche Informationen zum Umgang mit dem ExpansionPack. Da steht zum Beispiel etwas zu den MX-Funktionen.
Auswahl der Module
Jetzt müssen wir noch auswählen, welche Komponenten aus dem ExpansionPack genutzt werden sollen.
Es öffnet sich der "Software Pack Component Selector". Erst einmal ein kleines Bild. Ins Detail gehen wir gleich.
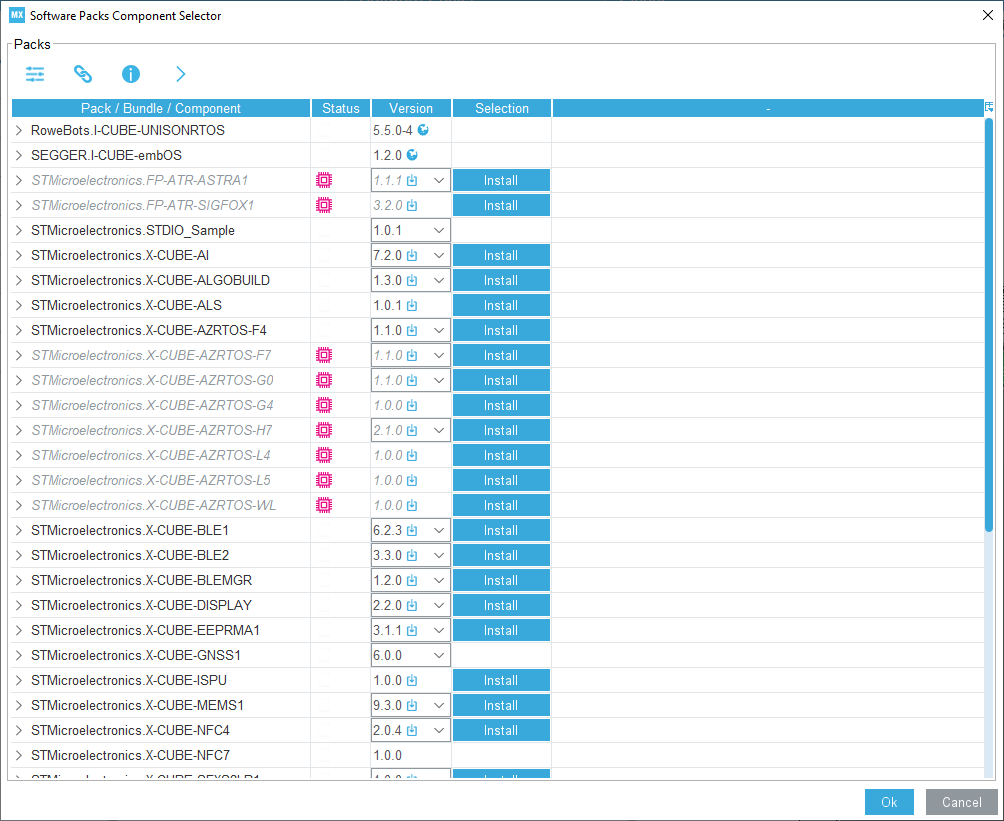
Hier sind unter anderem alle von STMicroelectronics verfügbaren ExpansionPacks auswählbar. Klickt man auf Install wird das jeweilige ExpansionPack bei STM herunter geladen und installiert. Wir scrollen aber ein wenig nach unten und suchen TM_Engineering.CAN_Stack.
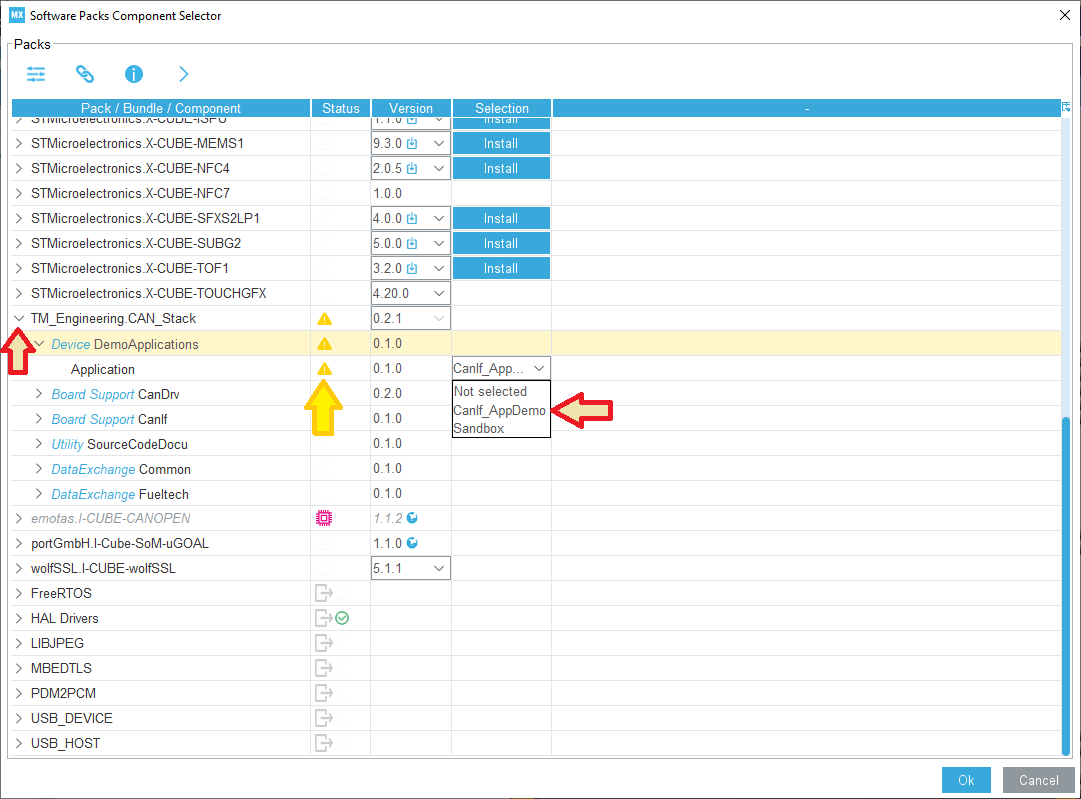
Durch Klick auf ">" kann man die einzelnen Module, oder genauer gesagt die einzelnen Bundles öffnen. Naiv wählen wir die Demo Application CanIf_AppDemo (deswegen haben wir unser Projekt am Anfang auch so benannt) aus.
Nun werden da aber ein paar gelbe Warnschilder mit Ausrufezeichen angezeigt.
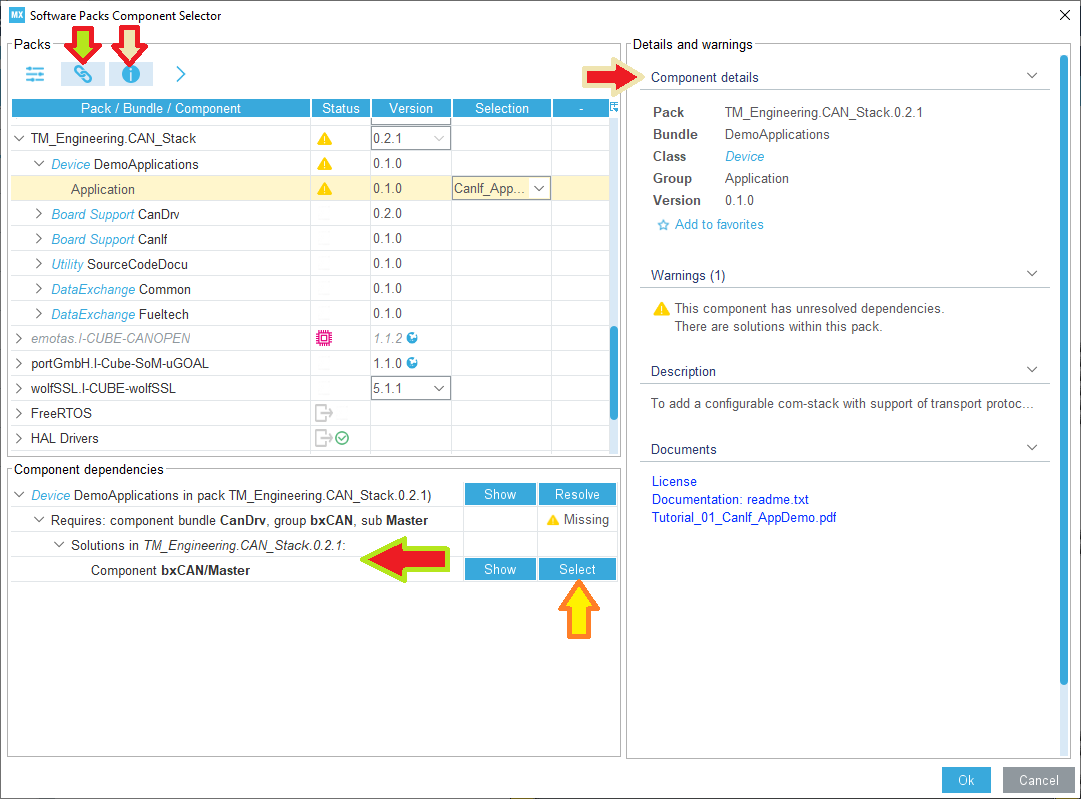
Klickt man auf den  button") Button (siehe beige/roter Pfeil) kann man ein paar Informationen zum jeweils aktiven Element bekommen. So steht zum Beispiel bei unserer Application: "This component has unresolved dependencies". Es braucht also noch irgend ein anderes Modul. Weiter steht da "There are solutions within this pack". Die Lösung des Problems liegt also nahe.
Button (siehe beige/roter Pfeil) kann man ein paar Informationen zum jeweils aktiven Element bekommen. So steht zum Beispiel bei unserer Application: "This component has unresolved dependencies". Es braucht also noch irgend ein anderes Modul. Weiter steht da "There are solutions within this pack". Die Lösung des Problems liegt also nahe.
Mit dem  Button (grün/roter Pfeil) dann kann man die Abhängigkeiten unmittelbar anzeigen. In unserem Fall braucht die
Button (grün/roter Pfeil) dann kann man die Abhängigkeiten unmittelbar anzeigen. In unserem Fall braucht die DemoApplication eine Komponente bxCAN/Master
Wir ergänzen also die noch notwendigen Module die sich alle im Bundle Board Support befinden.
- Man kann durch Auswahl der einzelnen Module versuchen das Problem selber zu lösen
- Man kann auch einzele Probleme mit "Select" lösen. ( So lernt man vielleicht etwas über den Aufbau des Packs)
- Mit "Show" kann man die Lösung vor selektieren.
- Und mit "Resolve" löst man alle verketteten Probleme mit einmal. Also in unserem Fall werden die fünf erforderlichen Module ausgewählt.
| Bundle | Module | Inhalt |
|---|---|---|
| CanDrv | CanDrv_APIclass | Das ist eine virtuelle Klasse Can. Diese stellt das API für alle kompatiblen CanDrv bereit |
| bxCAN / Master | Dies ist die Umsetzung des CanDrv_bxCAN für den STM bxCAN Controller. Für das Tutorial reicht uns der Master Controller | |
| CanIf | general | Hier sind die Header Files mit den Compiler Abhängigkeiten oder auch eine Klasse zur Handhabung von Versionsinformationen zur Laufzeit enthalten |
| ComIf | Darin ist eine virtuelle Klasse enthalten, welche zur Abstraktion von Kommunikation Interface Klassen ähnlich dem AUTOSAR Ansatz vorgesehen ist | |
| CanIf | Dies ist unsere abgeleitete Interface Klasse für die Kommunikation über CAN |
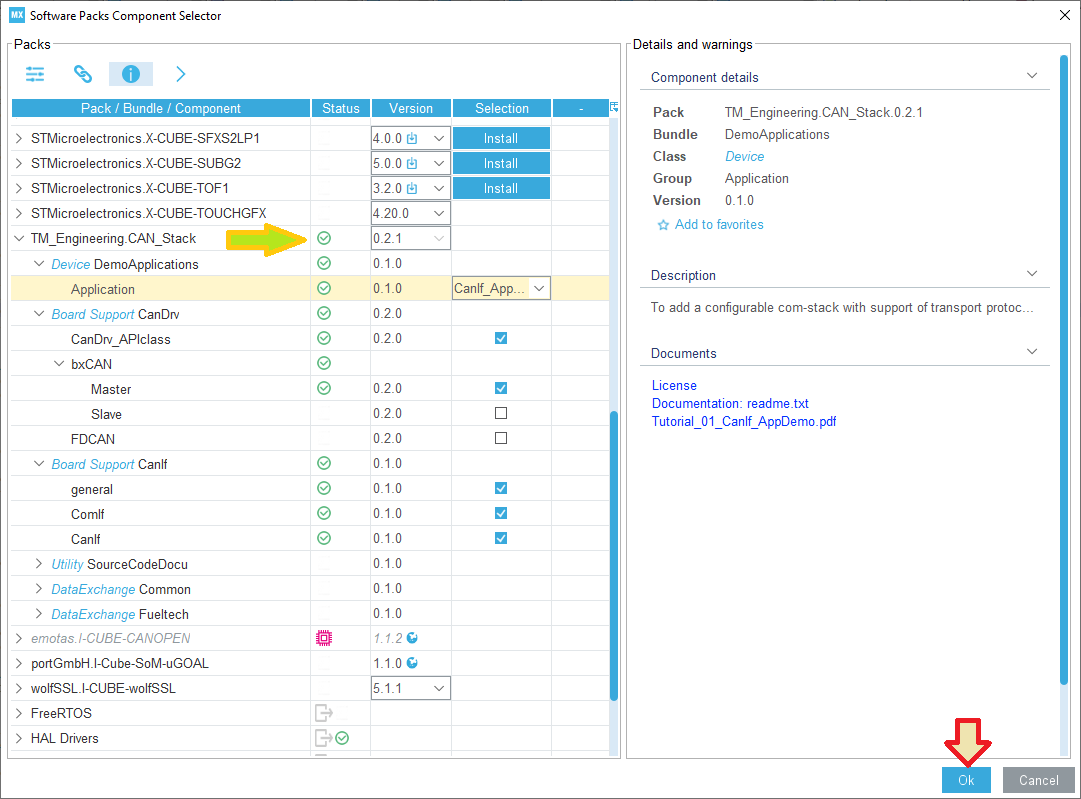
Haben wir diese fünf Module aktiv, werden wir mit grünen Häkchen belohnt und können den Selector wieder schließen.
Konfiguration der Module
Das Aktivieren der Module erfolgt auf dem gleichen Weg, wie wir zu Beginn das CAN-Modul aktiviert haben. In der linken Spalte des CanIf_AppDemo.ioc Viewers findet man jetzt einen weiteren Punkt "Software Packs". Unter diesen Punkt werden alle aktiven ExpansionPacks aufgeführt. Aktuell haben wir nur ein Pack, also ist hier auch nur unser TM_Engineering.CAN_Stack zu finden. Aktiviert man hier die Module erhält man im Configuration Abschnitt die Tabs "CAN Driver", "CAN Interface" und "User Constants". Der Tab "User Constants" ist der gleiche den wir schon aus den Einstellungen des CAN-Modules kennen.
CAN Driver
Der Tab CAN Driver beinhaltet die Konfigurationsparameter welche unmittelbar auf die Hardware wirken. In der AUTOSAR Spec werden diese Parameter durch das CAN-Modul bearbeitet.
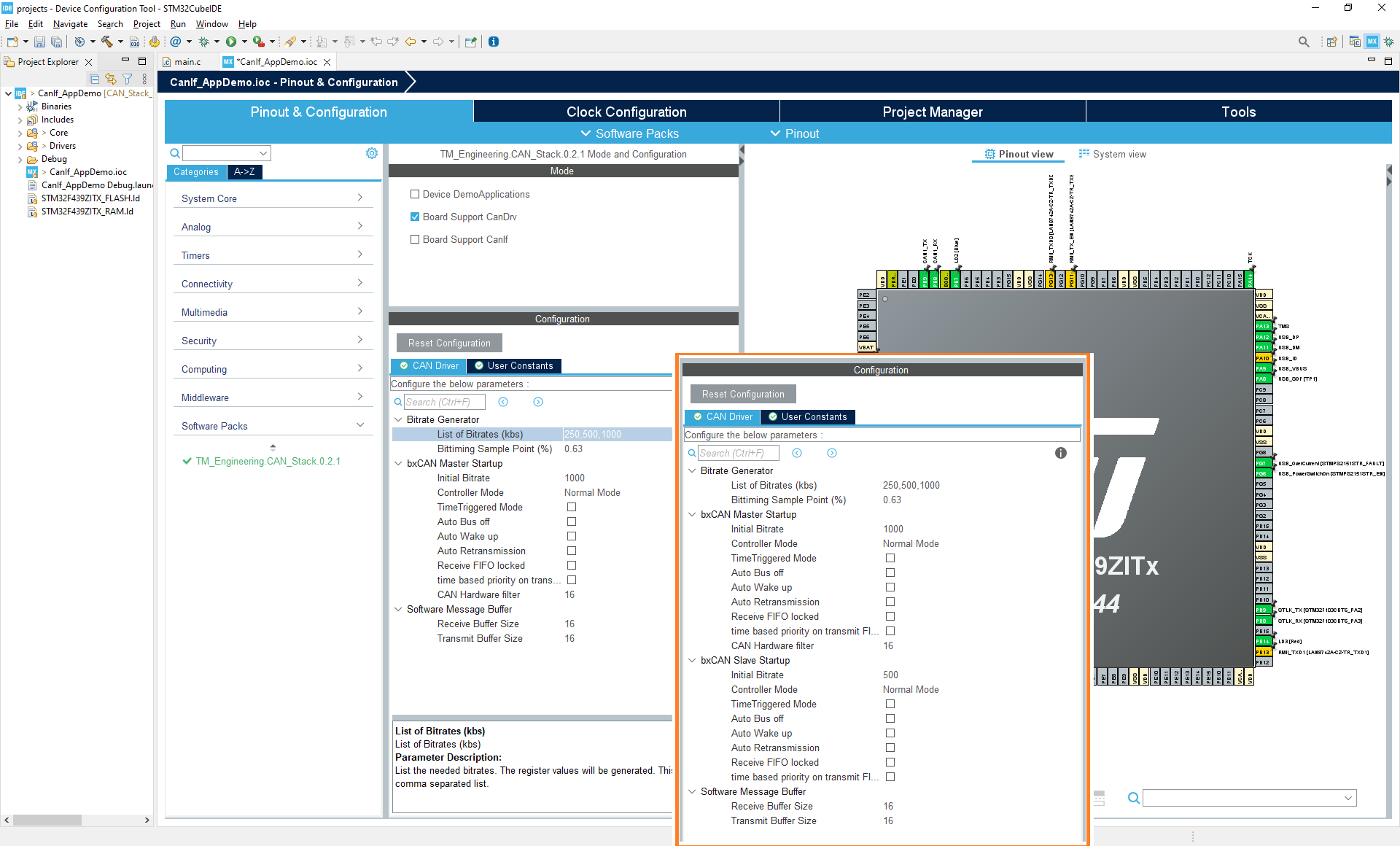
Auch in dem "Configuration" Abschnitt gibt es wieder einen (i) Button um mehr über die einzelnen Parameter zu erfahren.
Bitrate Generator
Mit diese Parameter werden durch den Source Code Generator die notwendigen Hardware Parameter für das Bit Timing berechnet um die jeweiligen Baudraten zu erzeugen. Neben diesen Parametern wird die Clock des CAN Modules aus den Systemparametern genutzt.
- Remarks
- Aktuell existiert kein Support für System Clock Switch während der Laufzeit!!!
| Parameter | Beschreibung |
|---|---|
| List of Bitrates | Hier wird die Liste der gewünschten Bitraten angelegt. Die einzelnen Bitraten werden durch Kommas getrennt. Die hier gewählten Baudraten sind während der Laufzeit auswählbar. |
| Bittiming Sample Point | Sample Point als Prozent oder Kommazahl. Der Sample Point muss entweder größer 50% oder eben 0.5 < x < 1 sein |
bxCAN Master Setup / bxCAN Slave Setup
Hier werden die Startup Parameter des bxCAN Master Controllers festgelegt.
Wenn man den bxCAN Slave auch aktiviert hat wird ein identischer Abschnitt für diesen angezeigt.
| Parameter | Wert | Beschreibung |
|---|---|---|
| Initial Bitrate | [ Zahl, Integer ] | Hier kann eine Bitrate ausgewählt werden welche zuvor im Bereich "Bitrate Generator" definiert wurde |
| Controller Mode | Normal | Standard. Der Controller nimmt ganz normal am Bus teil |
| Loopback | CAN-Tx und CAN-Rx des Controllers werden innerhalb des µC verbunden. Damit lässt sich ohne weiteren Teilnehmer ein aktives Busverhalten simulieren. | |
| Silent | Der Controller nimmt nicht an der Arbitrierung Teil. Damit kann man auf einem Bus mithören ohne diesen zu beeinflussen | |
| Silent & Loopback | Kombination aus den beiden | |
| Time Triggered Mode | true / false | Zeitstempel |
| Auto Bus off | true | Der CAN Controller geht nach einem Bus-Off von allein in den aktiven Zustand |
| false | Der CAN Controller muss per Software vom Bus-Off in den aktiven Zustand gebracht werden. | |
| - | Der Bus-Off Zustand kann erst verlassen werden wenn 128 mal 11 rezessive Bits empfangen wurden (Siehe CAN-Error Mangement) | |
| Auto Wake up | true | Der CAN Controller wacht bei eingehenden NAchrichten von alleine auf |
| false | Der CAN Controller muss per Software geweckt werden | |
| Auto Retransmission | true / false | Wählt aus ob die Nachrichten bei fehlgeschlagener Arbitrierung erneut gesendet werden sollen |
| This value is inverted to the Bit 4 NART: No automatic retransmission of the bxCAN controller. The inversion is done inside the HAL Init function. | |
| Receive FIFO Locked | true | Neue Nachrichten überschreiben den vollen Rx-FIFO |
| false | Es werden keine weiteren Nachrichten mehr angenommen, wenn der Rx-FIFO voll ist | |
| time based priority on transmission | true | Das Senden erfolgt in der zeitlichen Reihenfolge wie die Messages dem Tx-FIFO übergeben werden |
| false | Das Senden unterliegt den normalen Arbitrierungsregeln, es wird also entsprechend der CAN-Id der Vorrang gegeben | |
| CAN Hardware filter | [ Zahl, Integer ] | Gibt die maximale Anzahl der genutzten Hardware Filter für diesen Controller an. Der bxCAN Slave hat die restlichen Filter des bxCAN Masters zur Verfügung |
Software Message Buffer
Der bxCAN Controller stellt nur einen drei Nachrichten großen Receive FIFO und sowie drei Transmit Mailboxen zur Verfügung. Ich habe dem Modul je einen Software Buffer für Receive und Transmit spendiert. Die Größe kann hier über die Parameter eingestellt werden.
CAN Interface
Ich muss hier dann noch das System mit den PDUs erklären.
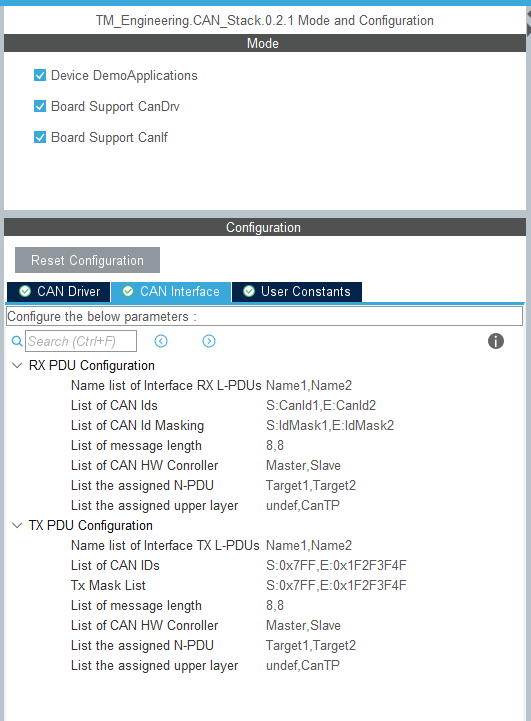
RX/TX PDU Configuration
Alle Parameter sind als Komma-Listen zu benutzten. Das heißt auch, dass in jeder Liste die gleiche Anzahl an Elementen vorhanden sein muss. Stimmt die Anzahl der Elemente eines Parameters nicht, so wird der Source Code Generator eine Fehlermeldung generieren.
In diesem Fall sind die generierten Konfigurationsdateien nutzlos.
- Todo:
- Vielleicht kennt jemand ja einen Weg diese Konfiguration in Tabellenform ähnlich der FreeRTOS Konfiguration in der STM32CubeIDE umzusetzen.
Ziel ist es, dass die Konfiguration hier nur für Nachrichten ohne Übertragungsprotokoll notwendig ist. Das CanFT2p0, sowie das IsoTp -Protokoll führen die Konfiguration schon selber durch.
Kurzbeschreibung
Die Tabelle gibt einen ersten Überblick. Die Parameter werden danach im Detail beschrieben.
| Parameter | Wert (Aufbau) | Beschreibung |
|---|---|---|
| Name L-PDU | Name | Name als String |
| CAN Id | S:0x123 | Standard 11bit Identifier in hexadezimal Format |
| E:0x123456 | Extended 29bit Identifier in hexadezimal Format | |
| CAN Id Masking | S/E:0x0 | Aufbau genauso wie CAN Id |
| HW Controller | Master oder M | wählt den bxCAN Master als Controller aus |
| Slave oder S | wählt den bxCAN Slave als Controller aus | |
| assigned N-PDU | Name | gibt den Namen der Nachricht im UpperLayer (was in der Regel das Übertragungsprotokoll ist) an |
| assigned upper layer | undef | es wurde kein spezielles UpperLayer ausgewählt. Die Message muss im CAN Interface abgeholt werden |
| CanTP | das UpperLayer dieser Message ist das IsoTP | |
| CanFT | das UpperLayer dieser Nachricht ist das CANFT2.0 Protokoll | |
| ... | die möglichen Protokolle können erweitert werden. |
Name list of Interface L-PDUs
Liste der L-PDU Namen.
Mit Hilfe der PDU-Namen wird der jeweilige "Kommunikationspfad" ausgewählt. So wird zum Beispiel der Funktion CanIf::Transmit() die TxPduId und ein Pointer zu den zu sendenden Datenbytes übergeben.
Die Namen werden hier in der Oberfläche immer ohne irgendwelche Prefixe oder Ergänzungen genannt. Im Code werden die Namen dann mit dem Prefix des jeweiligen Modules sowie mit Rx-/Tx-Kennung versehen. Die erzeugten Namen aller Module sind dann in der EcuNames_Cfg.h zu finden.
Wir können im Tutorial die Namen erst einmal so belassen. Ich werde bei den folgenden Punkten nur dann explizit erwähnen, das wir etwas ändern, wo es notwendig ist.
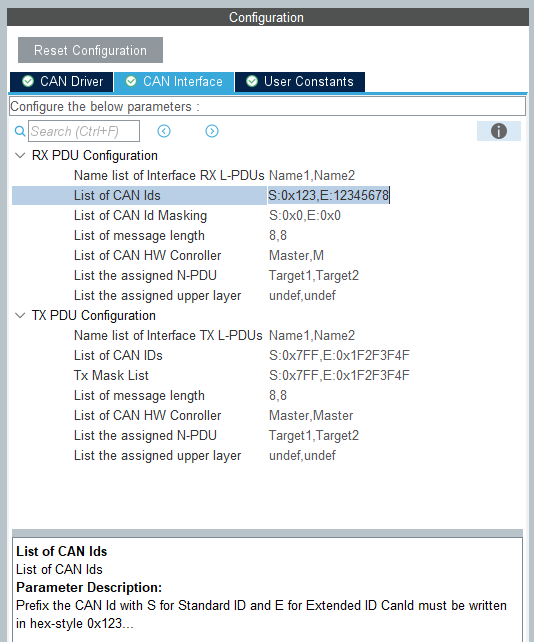
List of CAN Ids / List of CAN Id Masking
Diese zwei Parameter werden zur Konfiguration der Hardware Filter genutzt.
Das erste Zeichen gibt an ob das Extended Id Bit (IDE) gesetzt werden soll. Aktuell wird nur geprüft ob das erste Zeichen ein 'E' oder ein 'e' ist. Ist dies nicht der Fall, dann wird von Standard CAN ausgegangen. Das Trennzeichen an zweiter Stelle ist egal. Alle Zeichen ab der dritten Stelle bis zum nächsten Komma werden unverändert in den Source Code übernommen. Es stehen also alle gängigen Formationen (hex, dec, oct, bin) zur Verfügung.
CanId1, CanId2 oder auch IdMask1 und IdMask2 sind keine gültigen Zahlen. Demnach müssen wir hier im Tutorial gültige CAN-Ids eingeben
List of message length
Anzahl der Datenbytes
List of CAN HW Controller
Der verwendete CAN Controller per Name. Aktuell werden die Namen des bxCan Modules unterstützt. Also können Master oder Slave benannt werden. Alternativ kann mit dem ersten Buchstaben, also 'M' oder 'S' abgekürzt werden.
Die FDCAN Controller der neueren STM32 werden durchnummeriert. Ich werde aber auch Master als CAN1 und Slave als CAN2 akzeptieren.
Wir nutzen im Tutorial nur den Master des bxCAN. Also müssen wir aus dem Slave auch einen Master (oder Kurzform "M") machen.
List of assigned N-PDU
Hier wird der Name des übergelagerten PDU benannt. Diese Namen sollten durch die Konfiguration des jeweiligen Protokollmodules entstehen
Im Tutorial nutzen wir keine höheren Layer. Da diese Namen trotzdem vom Compiler gesucht werden, müssen diese Dummynamen bleiben.
List the assigned upper layer
Verwendetes Transport Layer (siehe auch CanIf_UpperLayerType). Das CanIf muss wissen an welches Protokollmodul eine empfangene Nachricht weiter gereicht werden muss, bzw wohin ein erfolgreiches Versenden zurück gemeldet werden muss.
AUTOSAR nutzt hierzu die Kombination aus "übergeordneten Layer" und "PDU-Id". Mit C++ läst sich das auch einfach in Funktionspointeraufrufen realisieren. Es wird also die Zukunft zeigen, wie weit wir das hier nutzen.
Damit das CanIf nicht versucht das IsoTP-Protokoll anzusprechen, müssen wir das CanTP zweimal zu undef ändern.
Nach der Änderung der Parameter sollte die Konfiguration so aussehen
Den Code für das CanIf Modul generieren
Jetzt noch das Modul für die DemoApplication aktivieren und wir können den Code Generator starten. 
Wenn man jetzt im Projekt Browser mal in die vielen neuen Verzeichnisse hinein schaut, wird man neue Dateien entdecken.
Alles was sich im Verzeichnis mit dem Application Namen befindet, sind generierte Dateien. Im Unterverzeichnis "Target" werden die eigentlichen Konfigurationen erzeugt. Das Verzeichnis "App" beinhaltet die eigentliche Application.
Die generierten Dateien verhalten sich sich genauso wie wir es in der main.c kennen gelernt haben. Es werden also nur Änderungen innerhalb der "User Code Blöcke" über eine Code Generation hinweg beibehalten.
Schaut man zum Beispiel einmal in die EcuNames_Cfg.h so findet man ziemlich am Anfang (die Kommentare sind für die Doku geändert)
/ * USER CODE BEGIN EcuNames_Cfg__h 0 * /
/ ** @brief this enum shows the naming conventions of used PDU names * /
typedef enum
{
N_PDU_Dummy_for_Test,
L_PDU_Dummy_for_Test,
CanUndefUl_Rx_Target1,
CanUndefUl_Rx_Target2,
CanUndefUl_Tx_Target1,
CanUndefUl_Tx_Target2
}CanUL_PDU_for_Test;
/ * USER CODE END EcuNames_Cfg__h 0 * /
Man kann dieses enum also frei bearbeiten. Hier sind auch unsere Rx und Tx PDU Namen Target1 und Target2 als Dummy angelegt.
Im Verzeichnis "Drivers/BSP" gibt es jetzt ein Verzeichnis "TM_Engineering_board". Darin sind die kopierten Dateien aus dem Board Support Package. Diese Dateien werden bei jeder Code Generation neu hier her kopiert. Änderungen da drin können also nur zu Versuchszwecken durch geführt werden und sind nicht angedacht.
In der oben geöffneten main() kann man auch erkennen das eine MX_CanIf_AppDemo_Init() und eine MX_CanIf_AppDemo_Process() Funktion aufgerufen wird. Beide Funktionen sind in der CanIf_AppDemo.cpp implementiert. Wir können also abseits der eigentlichen main() mit C++ objektorientiert weiter arbeiten.
Das ExpansionPack übernimmt Aufgaben aus der HAL
Also wollen wir mal ausprobieren ob sich die "CanIf_AppDemo" bauen lässt.
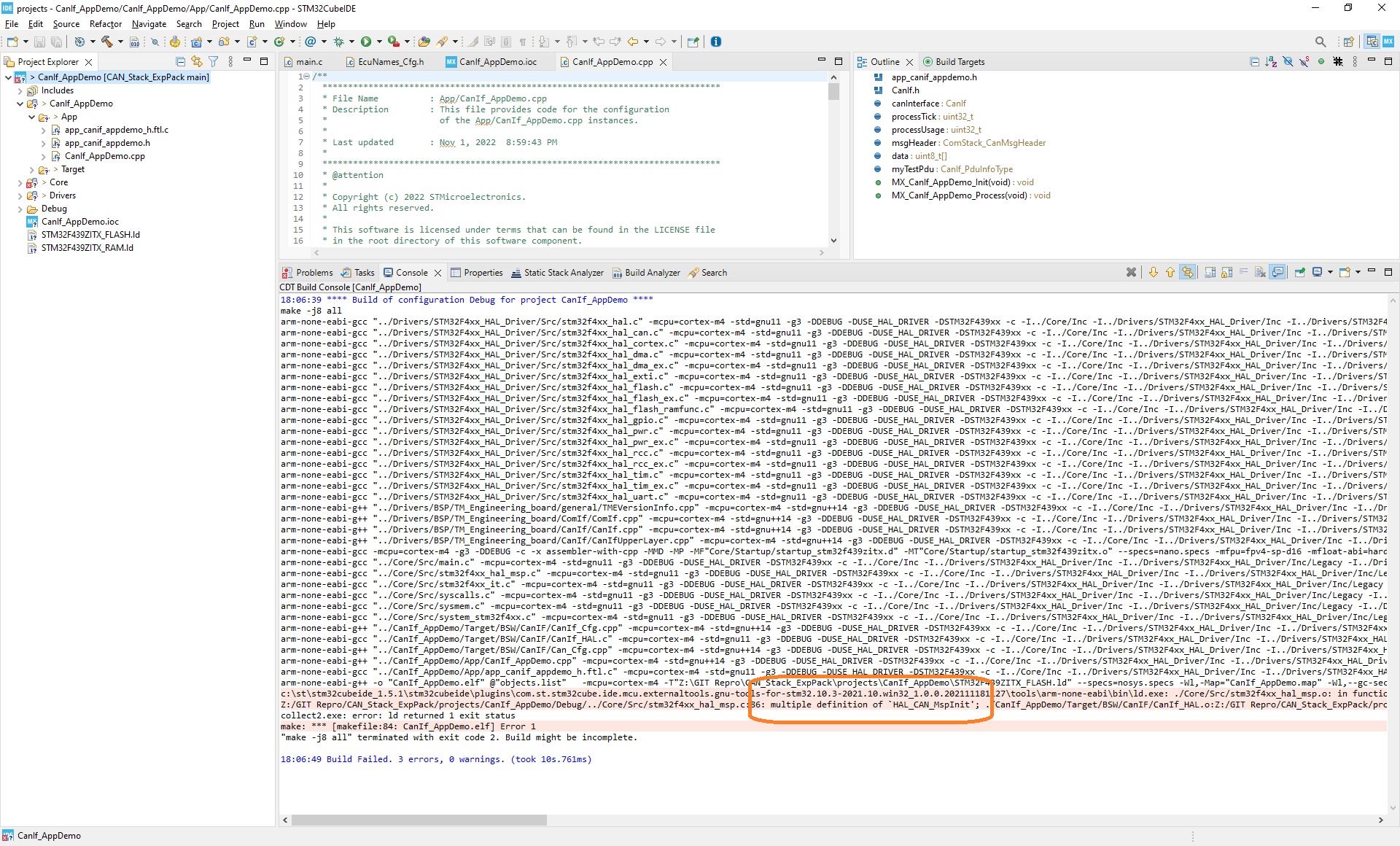
Wir erinnern uns daran, dass in der Information des ExpansionPack etwas stand, dass wir das Generieren der HAL-Funktionen deaktivieren müssen. Und genau das ist der Grund für diesen Linker Fehler.
Wir müssen also noch ein mal in die Konfiguration zurück.
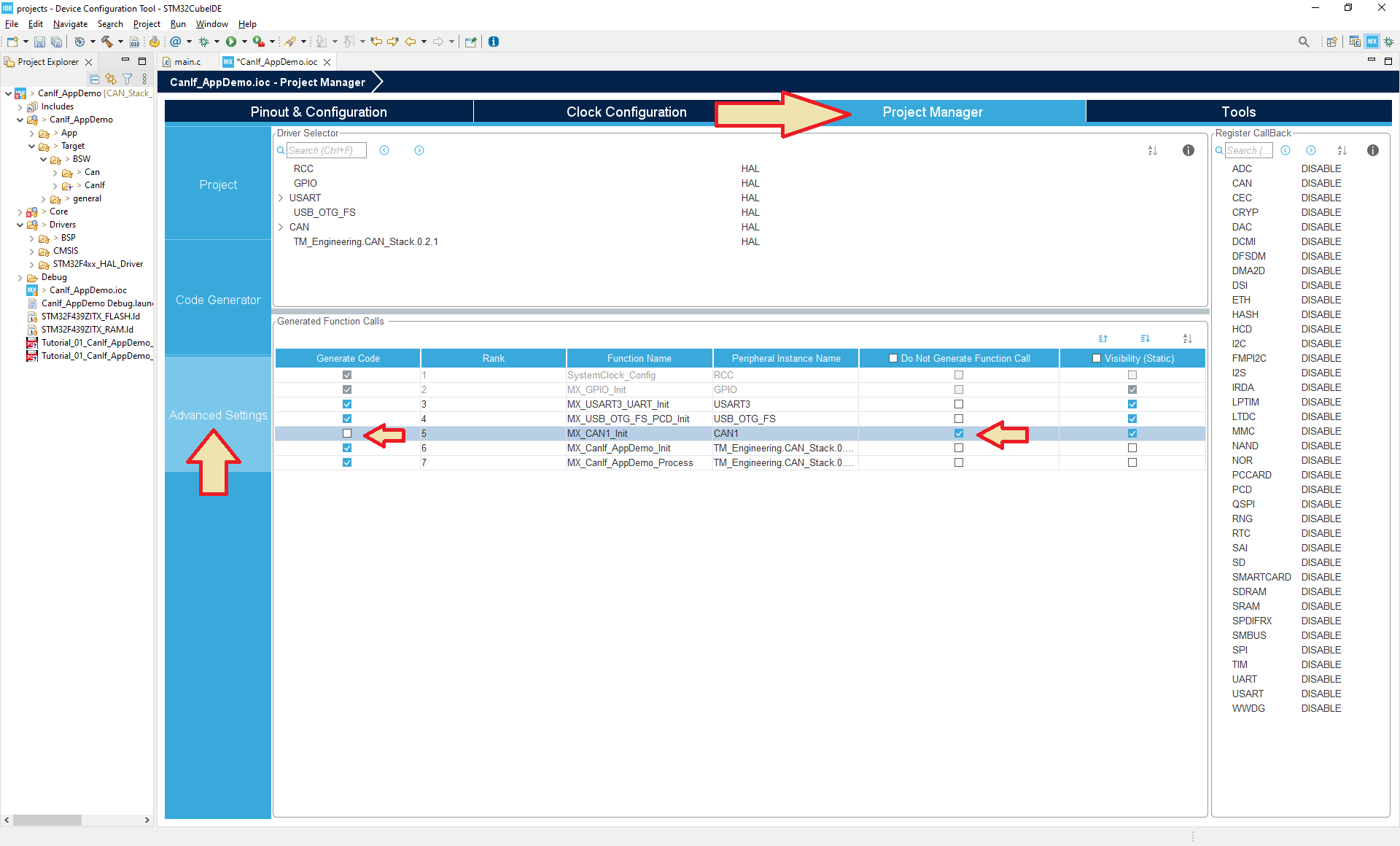
Der CanIf_AppDemo.ioc Viewer hat ein Tab "Project Manager". Hier findet man verschiedene Einstellmöglichkeiten für den Umgang mit dem STM32Cube Code Generator. Im Bereich "Advanced Settings" findet man die Möglichkeit die Generierung für die aktiven Module zu beeinflussen. So kann man unter anderem auch wählen ob man die HAL oder gar eine Low Level Ansatz für die Module nutzen möchte.
Im Bereich "Generated Function Calls" werden alle durch den Code Generator erzeugbaren Funktionen aufgelistet. Das TM_Enineering.CAN_Stack Modul soll die Aufgaben des CAN1 (oder evtl auch des CAN2) Modules übernehmen. Wir müssen somit die Code Generierung sowie den Funktionsaufruf der MX_CAN1_Init() unterbinden.
Haben wir das getan, können wir den Code Generator noch einmal starten und anschließend das Projekt erfolgreich compilieren.
Es wird Zeit für die Hardware
Wir wollen Software für einen STM32 Mikrocontroller programmieren. Also brauchen wir auch einen Controller welcher unsere Software ausführen soll.
Wie ich zum Start des Tutorials erwähnt habe, möchte ich als Beispiel ein Nulceo-F439ZI Board, welches per Aufsteckboard mit CAN Transciever erweitert wurde, nutzen.
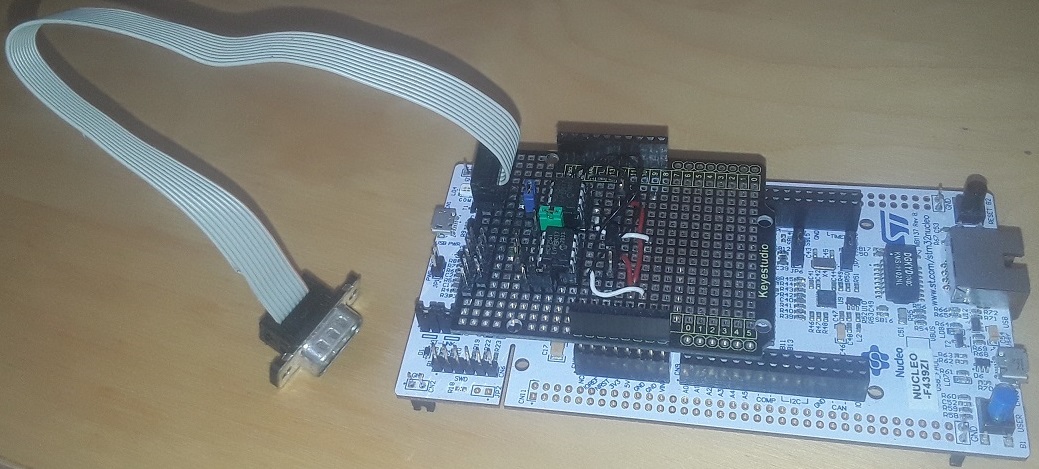
Die Beschreibung des Aufsteckboards soll hier nicht explizit erklärt werden. Bei Interesse kann ich das irgendwann mal ergänzen.
Wir verbinden den auf dem NUCLEO-Board vorhandenen ST-Link mit dem PC und starten den Debug Modus über die STM32CubeIDE. 
Beim ersten Start des Debuggers müssen wir diesen auch einrichten.
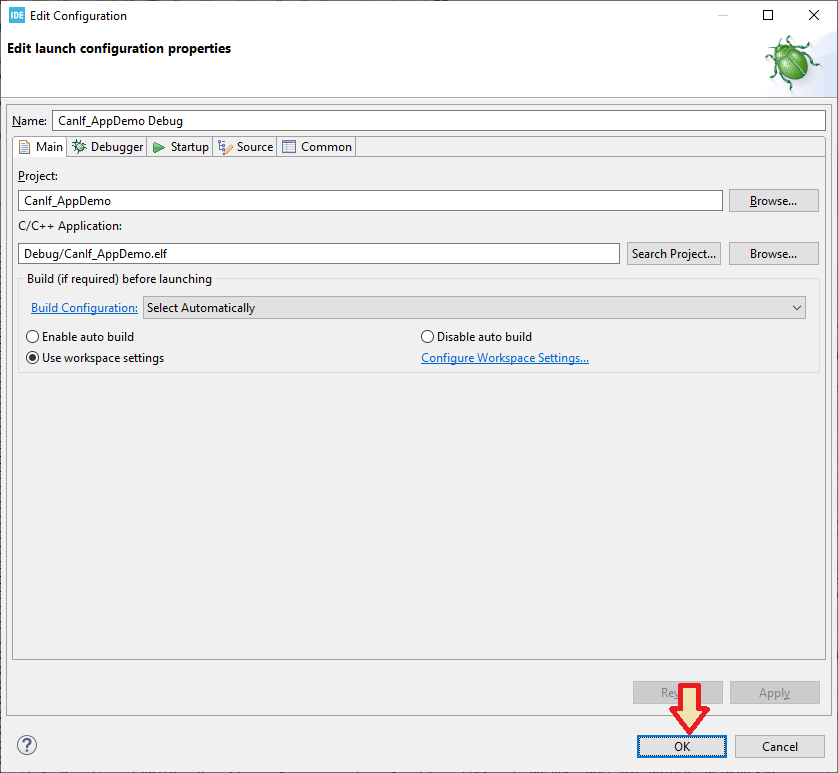
Bei unserem aktuellen Tutorialprojekt braucht es keine speziellen Einstellungen. Also können wie mit den vor eingestellten Optionen arbeiten und alles mit OK bestätigen. Nun wird noch die schon bekannte Frage nach zugeordneten "Ansicht, bzw auf Englisch "perspective" gestellt, welche wir auch mit "Switch" bestätigen.
Die Debugger Ansicht wird nach einem kurzen Moment mit einem Standard-Breakpoint in der main() -Function zur Ruhe kommen.
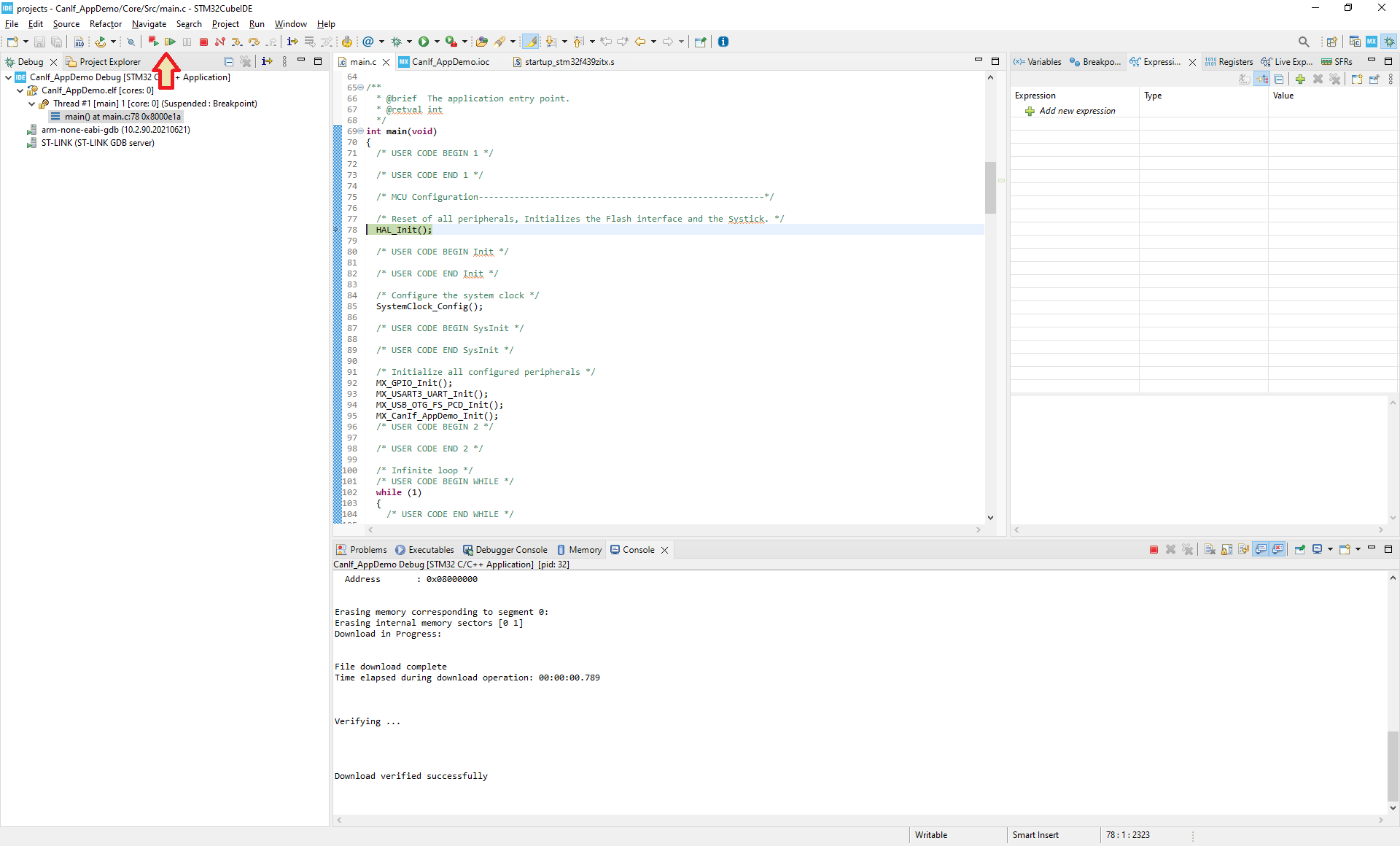
Mit einem Klick auf den "Play"-Button  wird das bereits in den Controller geladene Programm gestartet. Wenn alles gut gegangen ist, sollte man jetzt mit Hilfe eines beliebigen CAN-Tools Nachrichten empfangen können.
wird das bereits in den Controller geladene Programm gestartet. Wenn alles gut gegangen ist, sollte man jetzt mit Hilfe eines beliebigen CAN-Tools Nachrichten empfangen können.
Das Tutorialprogramm sendet mit der CAN Id 0x1FF die Versionsinfo des CanIf Modules.
- Note
- Today the tutorial has no data receive. I will add this in a upcoming version.
Was ist bei einem "normalen" Öffnen der IDE anders als beim ersten Start
Öffnet man die STM32CubeIDE "normal" (also nicht zum ersten Mal) so werden die zuletzt geöffneten Dateien auch wieder geöffnet angezeigt. Eine Ausnahme stellt die "*.ioc" Datei dar. Diese ist nicht geöffnet. Hierbei muss man im Hinterkopf behalten, dass der Code Generator  nur dann anwählbar ist, wenn die "*.ioc" Datei geöffnet ist. Man kann also auch umgekehrt vermeiden, aus Versehene heraus den Code Generator zu starten in dem man die "*.ioc" Datei schließt.
nur dann anwählbar ist, wenn die "*.ioc" Datei geöffnet ist. Man kann also auch umgekehrt vermeiden, aus Versehene heraus den Code Generator zu starten in dem man die "*.ioc" Datei schließt.
Das "Information Center" welches uns beim ersten Öffnen der STM32CubeIDE begrüßt hat, lässt sich mit dem  - Button aufrufen.
- Button aufrufen.
